Самодельный ЧПУ станок
Разделы сайта
Интересное предложение

Лучшее
Статистика

Designed by:


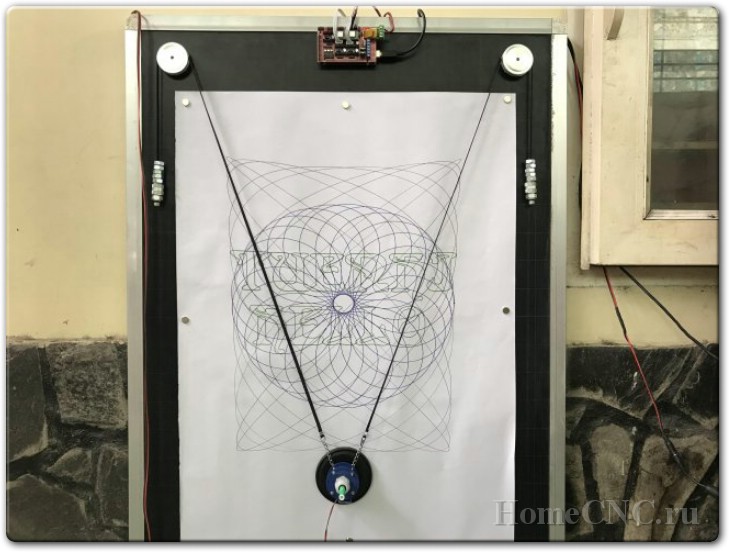
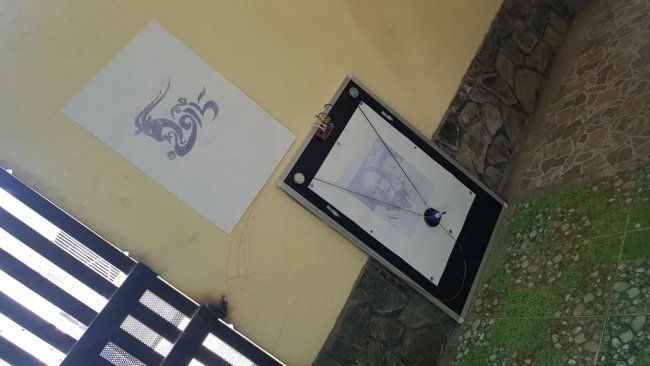
Вертикальный плоттер — это устройство для рисования и чертежния на больших вертикальных поверхностях.

В этой статье я расскажу вам про устройство и изготовление такого плоттера, а так же вы сможете найти ссылки на комплект для самостоятельной сборки с АлиЭкспресс.
Электронная часть собрана на базе Arduino с заливкой готового софта.
Механическая часть вертикального плоттера состоит из 2-х шаговых двигателей, держателя маркера с сервомашинкой (отодвигает маркер от доски, когда не надо рисовать) и нити с противовесами.

Рисует плотер за счет протяжки маркера по поверхности, соответственно рисунок состояит из линий и обычную фотографию надо предварительно подготовить.

Гораздо лучше чем фотографии, плоттеру удаются всевозможные чертежи и и рисунки созданные из кривых и прямых линий.
Размеры плоттера зависят только от длины нити и основания, если закрепить его на стене дома и разнести боковые части на углы под крышей, то можно разрисовать весь дом!
Вот пример рисования векторного рисунка
В этой статье рассматривается изготовление самодельного вертикального плоттера для работы с бумагой формата А1 и меньше.
Давайте посмотрим небольшое видео с демонстрацией работы плоттера.
Инструменты и материалы для сборки самодельного чертикального плоттера
Можно взять готовый набор плоттера с АлиЭкспресс

Вы так же можете найти этот товар на AliExpress
Китайцы слегка упростили конструкцию, но суть и работоспособность осталась та же.
В первой части — рисует растровый рисунок (фотографию), после половины видео рисует векторный чертеж Железного человека.
Но, переходим к изготовлению вертикального плоттера
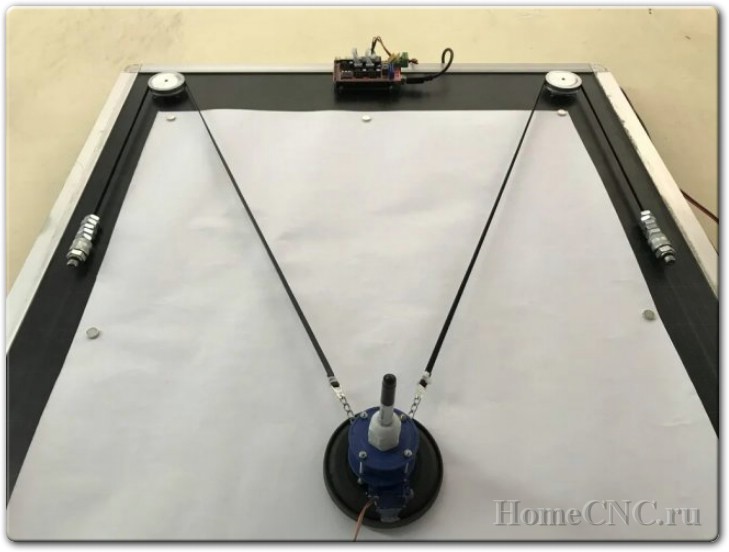
V-Plotter — это своего рода плоттер с ЧПУ, который рисует текст и изображения, перемещая перо по вертикальной поверхности. Он имеет простую механическую конструкцию, в том числе:
Одна доска.
Два шаговых двигателя со шкивами и ремнями.
Микро-сервопривод подъема ручки.
Пара противовесов.
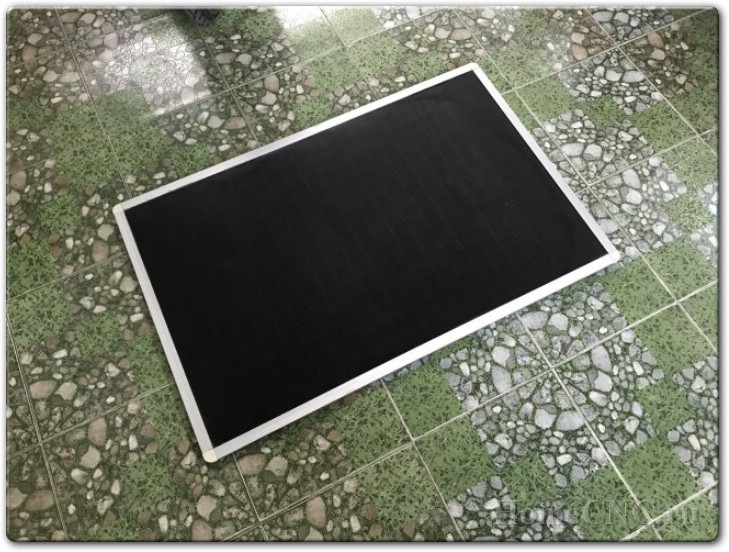
У мастера была классная доска размером 780 x 1200 мм, которой его дети больше не пользуются. Именно ее он и использует в качестве основания конструкции.
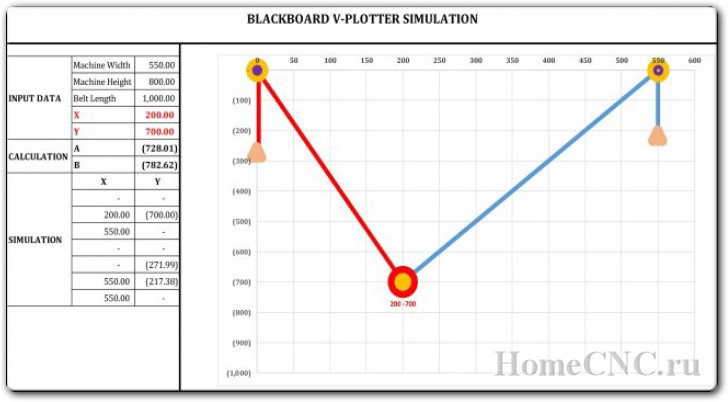
Размеры плоттера следующие:
Ширина: 550 мм.
Высота: 800 мм.
Длина ремня: 1000 мм.
Подготовка доски
Классная доска, включая алюминиевую рамку имеет размер 780 x 1200 мм. Толщина доски 30 мм. С одной стороны, по углам сверлятся отверстия для шаговых двигателей. Расстояние между центрами двух отверстий 600 мм.

С обратной стороны доски устанавливаются шаговые двигатели.

Устанавливаются на валы двигателей шкивы. Шкив имеет 80 зубьев. Шаг зубьев шкива GT2 80 составляет 2 мм на зуб, поэтому его диаметр равен 80×2 / PI = 50,955 мм.

Сверлятся 4 отверстия для крепления и устанавливается плата Arduino Mega 2560 + RAMPS 1.4 по центру верхней части доски.

Сборка узла держателя ручки
Основными компонентами для сборки держателя ручки являются: фитинг, кабельный ввод, ремень и гайки. Но, можно реализовать и свою конструкцию.



Сначала он разрезам 2-метровый ремень ГРМ на две части, каждая по 1 метру. На одной стороне ремня, с помощью кабельной стяжки, закрепляем металлическую цепочку. На другой стороне ремня закрепляем штуцер.

Внутрь катушки устанавливаем два кабельных ввода. Затем сверлим отверстия и устанавливаем четыре винта.

Дальше приклеиваем сервопривод внизу пластиковой катушки (со стороны металлического кабельного ввода) и припаиваем 3 провода от сервопривода к контроллеру RAMPS 1.4. Наконец, на шкивы шагового двигателя навешиваем держатель ручки. Проверяем перемещение узла.

Во время черчения держатель пера может трястись, поэтому необходимо добавить противовесы изготовленные из гаек М10.

Закрепляем пластиковую колесо диаметром 100 мм и толщиной 10 мм.

Приклеиваем сервопривод к колесу и регулируем рычаг сервопривода так, чтобы он находился как можно ближе к кончику пера.

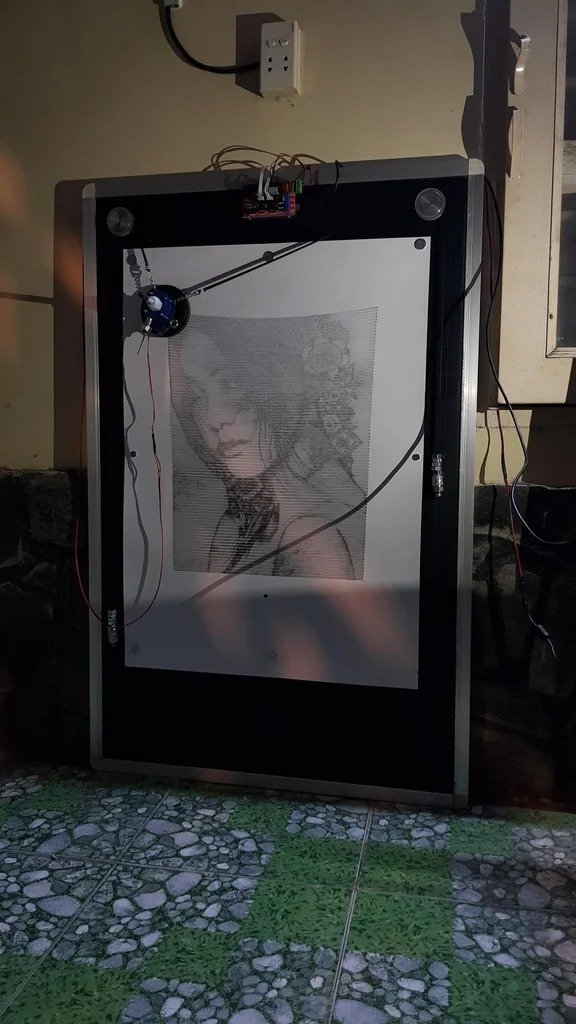
Устанавливает карандаш и проверяет работу.


В таком виде вертикальный плоттер рисует просто отлично.
Подключение электроники вертикального плоттера
Основными контроллерами вертикального плоттера являются Arduino Mega 2560 и RAMPS 1.4. Они управляют 2 шаговыми двигателями через драйверы A4988 и одним серводвигателем. Вот эскиз подключения устройства.
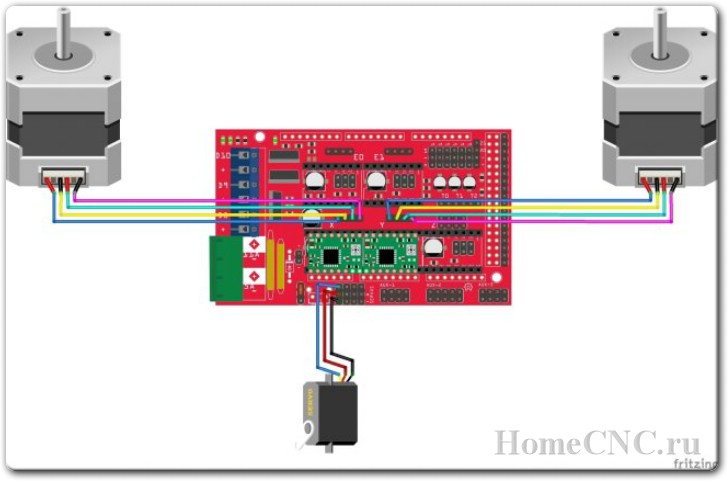
Для правильной работы плоттера два шаговых двигателя должны вращаться в противоположных направлениях, поэтому необходимо поменять местами провода правого двигателя. Подключаются шаговые двигатели левый на шильд X, правый на шильд Y.
RAMPS 1.4 имеет четыре штекерных разъема для подключения сервопривода: D11, D6, D5 и D4. Сервопривод подъема пера управляется штифтом D11.
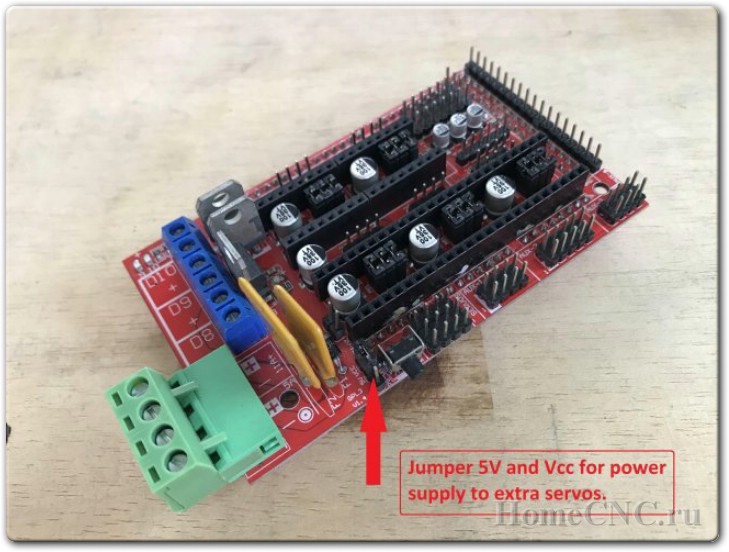
Что касается источника питания сервопривода, соединяем контакты Vcc и 5V вместе с помощью перемычки. Разъемы 5V и Vcc для питания сервопривода расположены рядом с кнопкой RESET. Это позволить питать плату от платы Ардуино. На фото ниже стрелкой указано место установки перемычки.
Для программирования использовался кабель от принтера HP длиной около 1,8 м. С обратной стороны доски закрепляется кабель-канал и провода кладутся в него.




Для работы плоттера использовалась прошивка Makelangelo — github . Прошивку Makelangelo можно использовать во многих различных контроллерах и кинематических системах.
- Вместе с готовым плоттером который можно заказать с АлиЭкспресс по ссылке выше, идет готовое ПО, которое не треует дорабток, прошивка уже злита в контроллер.
Для самодельного варианта необходимо внести несколько изменений в прошивку Mekalangelo, чтобы она была совместима с данным плоттером.
-Параметры конфигурации для вертикального плоттера: «configure.h «.
— Тип плоттера: Polargraph
— Контроллер: Arduino Mega 2560 + RAMPS 1.4
— Нет ЖК-дисплея
-Параметры конфигурации для полярографа: «robot_polargraph.h »
— Версия: MAKELANGELO_5
— С ручным подъемником.
— Без ЖК-дисплея — Без SDCard — Без концевых выключателей.
-Настройки шагового двигателя и шкива: «configMotors.h «.
— Он использовал шаговые двигатели NEMA 17 с углом шага: 1,8 °. Таким образом, количество шагов, необходимых для того, чтобы шаговые двигатели совершили 1 полный оборот: 200 шагов / оборот.
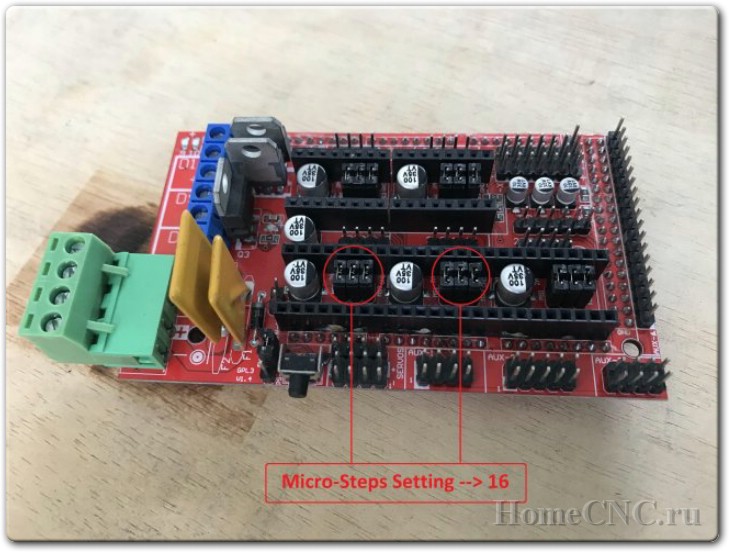
— Настройка микрошагов A4988: 1/16. (Драйвер A4988 позволяет увеличить это значение за счет возможности управления промежуточными шагами и имеет пять режимов микрошага (1(полный), 1/2, 1/4, 1/8 и 1/16).)
— В плоттере использовался ремень ГРМ GT2 с шагом 2 мм на зуб и шкивы GT2-80 с 80 зубьями. Значение 80×2 = 160 мм Шаг шкива означает длину окружности шкивов (диаметр шкива = 160 / PI = 50,9 мм) или расстояние перемещения зубчатых ремней, когда шаговые двигатели совершают 1 оборот.
-Настройка контактов Arduino Mega 2560: «board_ramps.h »
Обратите внимание, что RAMPS 1.4 имеет четыре штекерных разъема сервопривода, привязанных к контактам D11, D6, D5 и D4. В данном устройстве использовался штифт D11 для управления сервоприводом подъема ручки.
Программное обеспечение
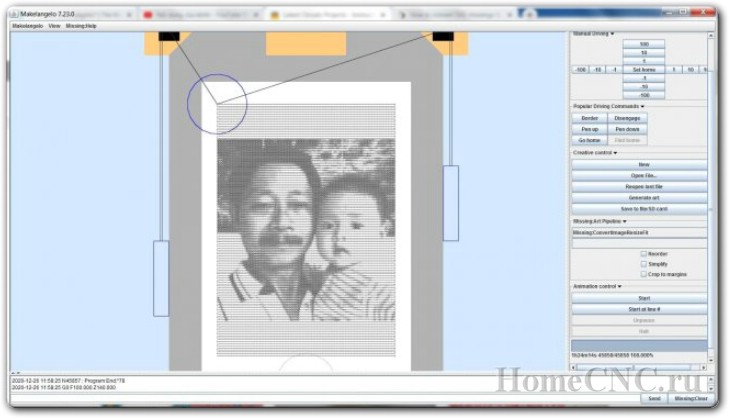
Программное обеспечение Makelangelo — это компьютерный инструмент, содержащий все необходимое для настройки и экспорта файлов печати для вертикального плоттера. Он позволяет настраивать конфигурацию плоттера, размер бумаги, настройку сервопривода подъема пера. Кроме того, он также имеет встроенные инструменты для преобразования изображений в GCODE и отправки их контроллеру плоттера.
О том, как использовать программное обеспечение Makelangego, можно узнать здесь .
Откройте программное обеспечение Makelangelo и подключитесь к Arduino Mega 2560.
Дальше нужно проверить направление движения валов шаговых двигателей и расстояние перемещения.
Из раскрывающегося списка нужно выбрать «Manual Driving» и понажимать кнопки влево, вправо, вверх, вниз, с дополнительными расстояниями перемещения 1, 10, 100 мм.
Нажмите кнопки Pen up/ Pen down, чтобы проверить работу сервопривода.
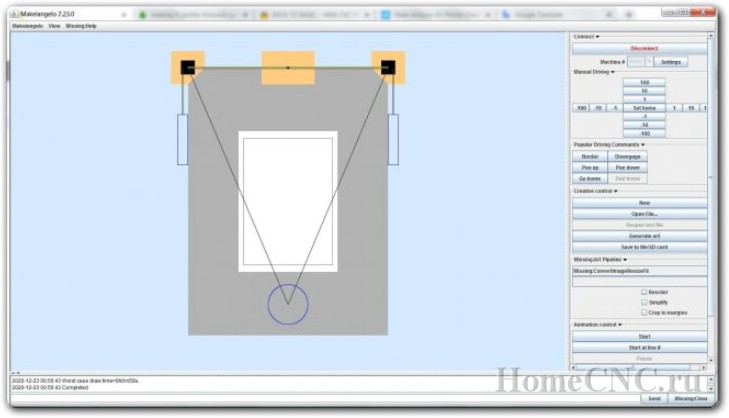
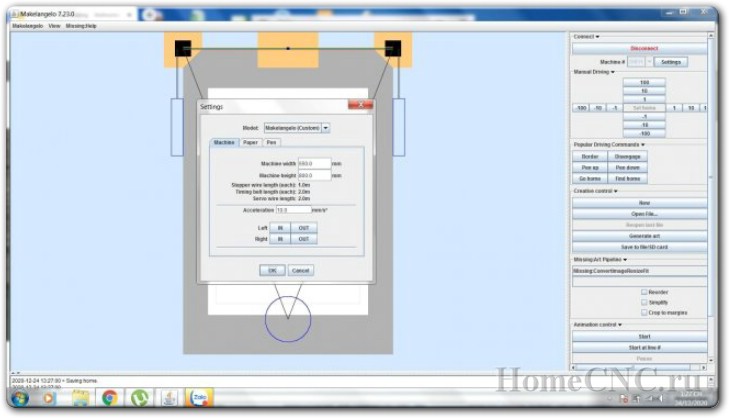
Дальше нужно открыть вкладку «Setting» и установить ряд настроек.
— Model: Makelangelo (Custom).
— Machine Width: 550 (mm).
— Machine Height: 800 (mm).
— Acceleration: 10 (mm/s).
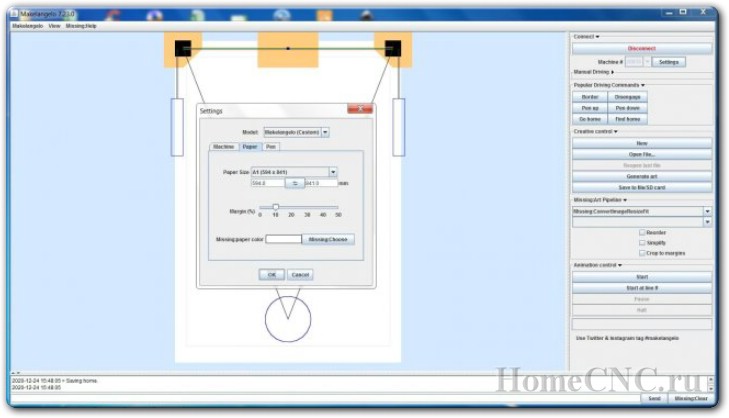
Устанавливаем размер бумаги и поля.
Настраивем перо и скорость рисования. Подъем ручки вверх / вниз можно откалибровать, регулируя значения угла сервопривода, скорость подъема и кнопки » Test «.
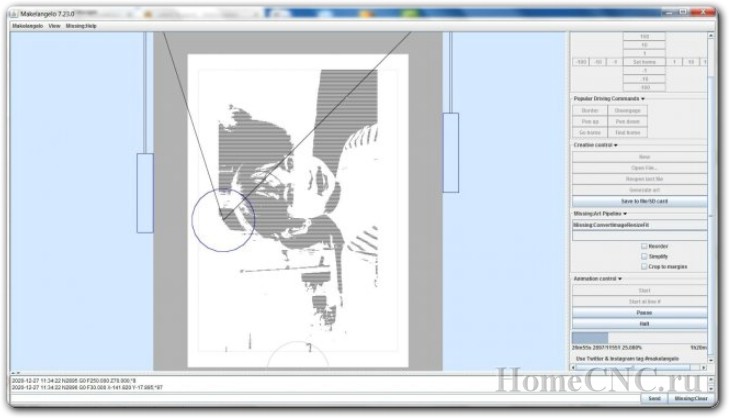
Дальше нужно нажать на «Generate art», выбрать график и настроить дополнительные параметры по усмотрению.
Затем нужно нажать «Open File», чтобы выбрать изображения. Программное обеспечение Makelangelo может конвертировать изображения JPG, PNG, BMP, GIF или DXF / SVG в GCODE в нескольких стилях формата преобразования.
Тестирование
Скачиваем https://content.instructables.com/ORIG/FAH/W2EW/KJ2UV8P2/FAHW2EWKJ2UV8P2.xls для имитации вертикального плоттера.

Нужно ввести координаты X, Y, и шаблон Excel будет моделировать положение пера, а также длину ремня от шкивов до пера и от шкивов до противовесов.
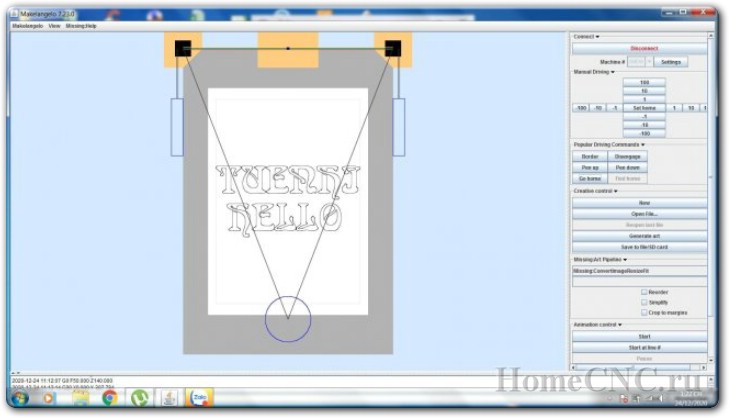
Чтобы провести первый тест, используем встроенную функцию «Generate art», далее «Your message here». В раскрывающемся списке, выбираем размер и шрифт, набираем сообщение (надпись) и нажимаем «Start».

Тест фигуры «Lissajous» из вкладки «Generate art».
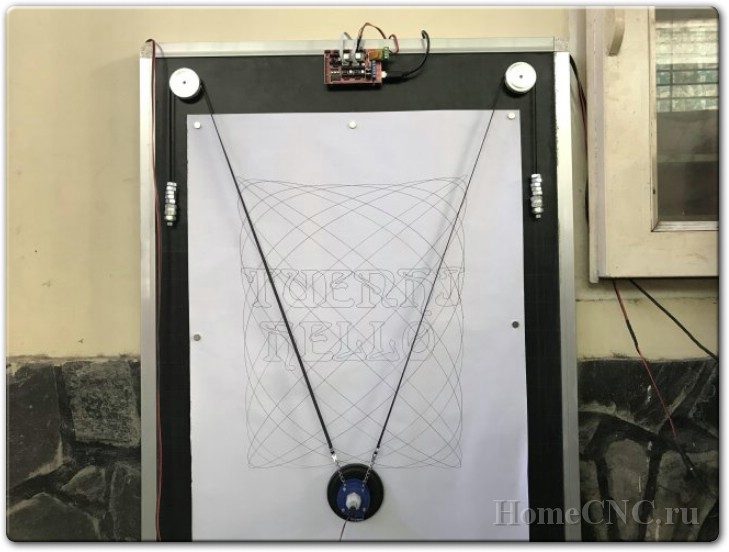
Тест фигуры «Spirograph».
Рисунок после раскрашивания вручную.

Дальше пробуем нарисовать портрет.

Для работы с фото нужно экспортировать изображение в формате DXF / SVG из Inkscape с расширениями штриховки, затем открыть этот файл DXF / SVG в Makelangelo, просто нажав «Пуск» для выполнения.

Некоторые моменты сборки плоттера, а также демонстрацию его работы можно посмотреть на видео.
Источник
4xiDraw Собираем перьевой плоттер на Arduino Часть1
Разработчик 4xiDraw: Мигель Санчес
Собственный плоттер он решил собрать, После просмотра видеоролика нового плоттера AxiDraw, который разработан Evil Mad Scientist.
В качестве управляющей платформы он выбрал Arduino Uno.
Шаговые двигатели NEMA 17 и сервопривод SG90 для поднятия и опускания ручки.
Свою первую модель основы плоттера, вырезал и фанеры на лазером станке:
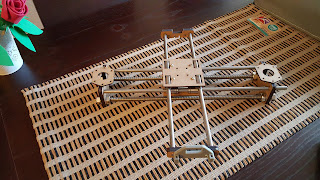
Как только первая модель была собрана, у Мигеля появились идеи по доработке плоттера используя для этого 3D принтер 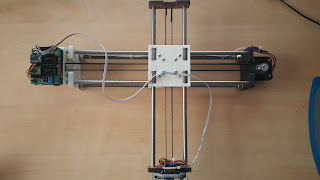
Для сборки «4xiDraw» нам понадобится:
2 шаговых двигателя nema 17 тут
4 8mm Гладкие стержни 2 шт. 400mm и 2 шт. 320mm (куплено в строительном магазине)
2 M10 Резьбовые стержни 400mm (куплено в строительном магазине)
8 LM8UU Линейные подшипники тут
2 GT2 Шкивы тут
10 F623ZZ подшипники тут
1 micro servo SG90 (плюс удлинитель кабеля 250 мм) тут
1 Arduino UNO тут
1 CNCshield тут
2 x Драйвер шагового двигателя A4988 тут
1 GT2 Ремень 1.4 метра тут
8 M10 гайки (куплено в строительном магазине)
8 30mm M3 Винты с гайками (куплено в строительном магазине)
8 6mm M3 Винты (куплено в строительном магазине)
4 16mm M3 Винты с гайками (куплено в строительном магазине)
4 M3 шайбы (куплено в строительном магазине)
2 15mm M3 винты (куплено в строительном магазине)
1 12V 2A блок питания (куплено в магазине электротоваров)
1 USB кабель (в любом магазине электроники)
1 Перьевая ручка ну или просто маркер 🙂
Источник