- Универсальный PID регулятор своими руками
- Оставьте комментарий:
- Навигация по сайту:
- Юный Технарь:
- Помощь проекту:
- Поиск
- Последние статьи
- Расширитель входов и выходов для ESP 01 …
- KaScada Cloud — Загрузка и выгрузка фай…
- Мой канал на YouTube
- Подпишитесь!
- Электроника и автоматика на МК
- ПИД регулятор
- Система управления
- Под капотом у ПИД регулятора
- P составляющая
- I составляющая
- D составляющая
- Настройка регулятора
- Реализация на C++
- Видео
- Симуляция ПИД-регулятора температуры
Универсальный PID регулятор своими руками
Универсальный PID регулятор своими руками.
Ссылка на сайт Станислава http://ucprog.ucoz.ru
Ссылки на компоненты:
ЖК-дисплей LCD1602 (синий экран)- http://ali.pub/alnru
Модуль расширителя интерфейса (I2C) — http://ali.pub/dwj5n
Датчик температуры и влажности DHT22 — http://ali.pub/0nide
Водонепроницаемый датчик температуры DS18b20 — http://ali.pub/9jc6p
Схема универсального PID регулятора

Оставьте комментарий:
Навигация по сайту:
Юный Технарь:
Помощь проекту:
Деньги можно перечислить на карту Сбербанка России:
4276 5400 2194 5088
Поиск
Последние статьи
Расширитель входов и выходов для ESP 01 …
Расширитель входов и выходов для ESP 01 на MCP23017.
KaScada Cloud — Загрузка и выгрузка фай…
KaScada Cloud — Загрузка и выгрузка файла.
Мой канал на YouTube

Подпишитесь!
2015, Arduinoprom.ru — блог Чилингаряна Грачика. Все авторские права на тексты принадлежат ему.
При размещении текстов и видеоматериалов на сторонних ресурсах активная гиперссылка ОБЯЗАТЕЛЬНА.
Все логотипы и товарные знаки, размещенные на сайте, принадлежат только их законным владельцам (правообладателям).
Источник
Электроника и автоматика на МК
Как- то раз, одна дружественная лаборатория попросила сделать для нее ПИД регулятор до 500 градусов с точностью удержания температуры не хуже 0,5 градуса, при этом точность установления самой температуры требовалась не очень высокая – около 3х градусов и, соответственно, градуировка термопары не закладывалась. Промышленный регулятор им не подошел ни по точности, ни по удобству. Так как менять температуру надо было очень часто, а делать это кнопками очень муторно , было решено в качестве задатчика температуры применить энкодер. Но, к сожалению, до железа дело так и не дошло, так как финансирование закончилось, как это часто у нас бывает, раньше чем поступили деньги. Временные характеристики нагревателя были приблизительно как у электрической конфорки, поэтому для того чтобы симуляция в протеусе не была слишком долгой и утомительной, шаг регулирования временных параметров уменьшен в 10 раз. Еще им нужен был аналоговый выход температуры. Температура подается на вход 12-и разрядного выносного АЦП, что обеспечивает шаг дискретности 0,125 градуса, хотя возможно это излишне. Все настройки вводятся в сервисном меню и запоминаются в ЕЕПРОМ. В сервисном режиме можно настраивать такие параметры, как: коэффициенты регулирования, период ПИД, период ШИМ, режим регулирования (ПИД, П, ПД, ПИ, Релейный режим – для подбора коэффициентов). Алгоритм регулирования классический и самый простой , с ограничением интегрирования. Для того чтобы войти в сервис, перед запуском симуляции переведите кнопку SERVIСE в нажатое состояние, запустите протеус (подайте питание), нажимая кнопку выберете нужный параметр и измените его вращением энкодера, далее нажимайте кнопку до выхода из сервисного меню. Dll-ка mcp3201 для тех у кого протеус меньше чем 7.10 прилагается в архиве. Mcp4921 можно вообще исключить из моделирования. Хотя программа сыровата и подглючивает (иногда АЦП вдруг читает нулевое значение, и срабатывает защита от обрыва термопары), да и опыта в микроконтроллерах у меня не очень много, все же надеюсь, что информация будет полезна тем, кто впервые хочет покрутить, пощупать ПИД регулятор, хотя бы виртуально.
Источник
ПИД регулятор
ПИД регулятор – один из самых распространенных автоматических регуляторов. Он настолько универсален, что применяется практически везде, где нужно автоматическое управление. Например температурой: специальные печи, холодильники, инкубаторы, паяльники, сопло и стол 3D принтера, ИК паяльные станции и прочее. Поддержание частоты оборотов мотора, например для станков. Всевозможные балансирующие штуки, гироскутеры, сигвеи, левитирующие магнитные платформы, и конечно же квадрокоптеры и самолёты с автопилотом. Это всё ПИД регулятор. Почему именно ПИД? Существуют и другие регуляторы, превосходящие ПИД по адаптивности к управляемой системе и стабильности, например линейно квадратичный. Но, чтобы грамотно синтезировать такой регулятор, нужно быть гораздо больше чем “семи пядей” во лбу, а настройка ПИД регулятора дело хоть и неприятное, но фактически очень простое и под силу любому, а сам ПИД регулятор универсален для почти любого процесса.
Система управления
Прежде чем переходить непосредственно к пиду, очень важно понять и запомнить несколько базовых понятий, из которых состоит автоматическая система. В первую очередь это регулятор, который всем заправляет и находится в центре системы. Регулятор в данном понимании – математический алгоритм или часть программы, которая крутится на микроконтроллере. Регулятор, как алгоритм, работает с обычными числами. Объект управления – это девайс, которым мы управляем, например печка или мотор. Для этого у нас есть управляющее устройство, например диммируемый тен или драйвер мотора. Управляющее устройство получает от регулятора управляющий сигнал, то есть конкретное число. Это может быть заполнение шим сигнала, от 0 до 255, а может быть угол поворота сервомашинки от 0 до 180, потому что регулятору без разницы чем управлять. В объекте управления у нас стоит датчик, с которого регулятор получает управляемую величину, то есть текущий сигнал с датчика. Это – обратная связь, которая и даёт возможность системе ирчно поддержать заданное значение. В случае с печкой это температура, а с мотором – частота оборотов. Ну и наконец регулятор получает установку (уставку), то есть число, к которому он должен привести текущее значение с датчика. Установка может задаваться каким угодно образом: крутилкой, ползунком, энкодером, кнопками, да хоть смской или голосовым вводом. Регулятору это неважно, для него это просто цифра. Задача регулятора состоит в том, чтобы сравнивать текущее значение с установкой и выдавать управляющий сигнал на управляющее устройство. То есть в программе это будет выглядеть условно так: регулятор получил установку, регулятор получил значение с датчика, регулятор выполнил вычисления и выдал нам управляющий сигнал, опять же число. Если это шим – мы его подаём через функцию генерации шим. Есть ещё один момент – регулятор должен делать расчёты и применять управляющий сигнал через равные промежутки времени, то есть с равным периодом или частотой. Эта частота называется частотой дискретизации системы, а период обозначается как dt, прямо как период интегрирования. ![]()
Под капотом у ПИД регулятора
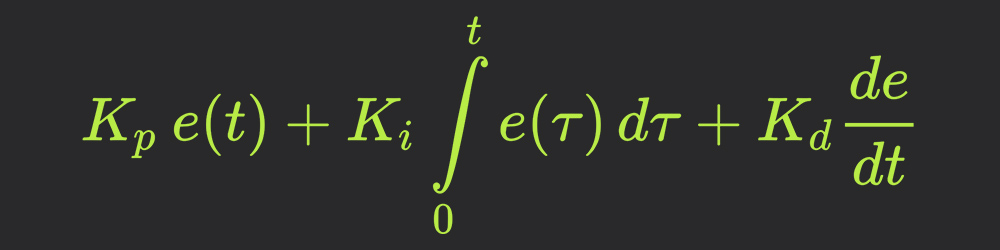
ПИД регулятор состоит из трёх составляющих: пропорциональной P, интегрирующей I и дифференциирующей D, формируется просто как сумма трёх значений, умноженных каждая на свой коэффициент. Эта сумма после вычислений становится управляющим сигналом, который подаётся на управляющее устройство, обозначим его как out.
kP, kI и kD это и есть те самые коэффициенты, которые нужно настроить для работы ПИДа. Значения тут могут быть самые разные, от 0.001 то десятков и тысяч, это зависит от конкретной системы. Тут есть ещё один момент: любой коэффициент может быть равен нулю, и в таком случае обнуляется вся его компонента. То есть регулятор можно превратить в П, ПИ, ПД, и прочие сочетания. Разные системы требуют разного подхода, именно поэтому ПИД регулятор такой универсальный. В дальнейшем будем пользоваться следующими названиями переменных:
- out – выход с регулятора (управляющий сигнал)
- setpoint – установка (заданное значение)
- input – вход (значение с датчика)
- err – ошибка регулирования
- dt – период вычисления и регулирования
P составляющая
Пропорциональная составляющая предоставляет собой разность текущего значения с датчика и установки.
Данная разность называется ошибкой регулирования, то есть насколько далеко находится система от заданного значения. Получается чем больше ошибка, тем больше будет управляющий сигнал и тем быстрее система будет приводить управляемую величину к заданному значению. Коэффициент kP тут влияет роль усиления ошибки и настраивается вручную. Но в то же время, если система пришла к заданной величине, ошибка станет равной нулю, и управляющий сигнал тоже! Другими словами, п регулятор никогда не сможет привести к заданному значению, всегда будет некая ошибка. П составляющая является основной в ПИД регуляторе и так сказать тянет самую большую лямку, регулятор может неплохо работать только лишь на ней одной. P составляющая исправляет ошибку в текущий момент времени.
I составляющая
Интегральная составляющая просто суммирует в саму себя ту же самую ошибку, разность текущего и заданного значения, умноженную на период дискретизации системы, то есть на время, прошедшее с предыдущего расчёта dt – фактически берёт интеграл от ошибки по времени.
В самом регуляторе это ещё умножается на коэффициент kI, которым настраивается резкость данной составляющей. В интегральной составляющей буквально копится ошибка, что позволяет регулятору с течением времени полностью её устранить, то есть привести систему ровно к заданному значению с максимальной точностью. I составляющая исправляет прошлые, накопившиеся ошибки.
D составляющая
Дифференциальная составляющая представляет собой разность текущей и предыдущей ошибки, поделенную на время между измерениями, то есть на ту же dt, которая общий период регулятора. Иными словами – это производная от ошибки по времени.
Фактически D составляющая реагирует на изменение сигнала с датчика, и чем сильнее происходит это изменение, тем большее значение прибавляется к общей сумме. Иными словами, D позволяет компенсировать резкие изменения в системе и при правильной настройке предотвратить сильное перерегулирование и уменьшить раскачку. Коэффициент д позволяет настроить вес, или резкость данной компенсации, как и остальные коэффициенты регулируют свои составляющие. D составляющая в первую очередь нужна для быстрых систем, то есть для систем с резкими изменениями, такие как квадрокоптер или шпиндель станка под переменной нагрузкой. D составляющая исправляет возможные будущие ошибки, анализируя скорость.
Настройка регулятора
Для настройки регулятора нужно варьировать коэффициенты:
- При увеличении kP увеличивается скорость выхода на установленное значение, увеличивается управляющий сигнал. Чисто математически система не может прийти ровно к заданному значению, так как при приближении к установке П составляющая пропорционально уменьшается. При дальнейшем увеличении kP реальная система теряет устойчивость и начинаются колебания.
- При увеличении kI растёт скорость компенсации накопившейся ошибки, что позволяет вывести систему точно к заданному значению с течением времени. Если система медленная, а kI слишком большой – интегральная сумма сильно вырастет и произойдёт перерегулирование, которое может иметь характер незатухающих колебаний с большим периодом. Поэтому интегральную сумму в алгоритме регулятора часто ограничивают, чтобы она не могла увеличиваться и уменьшаться до бесконечности.
- При увеличении kD растёт стабильность системы, она не даёт системе меняться слишком быстро. В то же время kD может стать причиной неадекватного поведения системы и постоянных скачков управляющего сигнала, если значение с датчика шумит. На каждое резкое изменение сигнала с датчика Д составляющая будет реагировать изменением управляющего сигнала, поэтому сигнал с датчика нужно фильтровать (читай урок по фильтрам).
Вот так выглядит процесс стабилизации при изменении коэффициентов:  Настройка регулятора – дело не очень простое. Начальные коэффициенты для подбора можно получить по следующему алгоритму: сначала выставляем все коэффициенты в 0. Плавно увеличиваем kP до появления незатухающих колебаний. Значение kP, при котором они появились, запишем и обозначим как kP1. Далее замеряем период колебаний системы в секундах, обозначим как T. Итоговые коэффициенты получим так:
Настройка регулятора – дело не очень простое. Начальные коэффициенты для подбора можно получить по следующему алгоритму: сначала выставляем все коэффициенты в 0. Плавно увеличиваем kP до появления незатухающих колебаний. Значение kP, при котором они появились, запишем и обозначим как kP1. Далее замеряем период колебаний системы в секундах, обозначим как T. Итоговые коэффициенты получим так:
- kP = 0.6 * kP1
- kI = kP / T * 2 * dt
- kD = kP * T / 8 / dt
Например, незатухающие колебания появились при kP 20, период колебаний составил 3 секунды. Период dt в системе будет 50 мс (0.05 с). Считаем:
На полученных коэффициентах должны более-менее работать большинство систем, но не все. Также можно воспользоваться автоматическим тюнером коэффициентов, например два разных алгоритма встроены в библиотеку GyverPID.
Реализация на C++
Соединяя все рассмотренные выше уравнения, получим:
Это готовая функция, которая принимает значение с датчика, установку, три коэффициента и время, а также ограничение выхода с регулятора. Как пользоваться этой функцией: функция должна вызываться с некоторым периодом, причем длительность этого периода нужно будет передать в функцию в секундах. Если попроще, можно использовать задержку. Но делать так не рекомендуется, лучше сделать таймер на миллис и работать с ним. Функция возвращает управляющий сигнал, то есть можно подать его например как ШИМ. Период dt имеет такой смысл: чем инерционнее у нас система, тем реже можно вычислять пид. Например для обогрева комнаты период можно поставить 1 секунду или больше, а для контроля за оборотами двигателя надо будет поставить пару десятков миллисекунд, то есть около сотни раз в секунду.
Видео
Источник
Симуляция ПИД-регулятора температуры
Поискал я статьи на данном ресурсе на тему ПИД-регуляторов. Много статей. И с объяснением принципов работы таких регуляторов. И с алгоритмами подбора параметров. И с реализацией на конкретных железках и программах. Не увидел одного — симуляции ПИД-регуляторов на моделях, с тем, чтобы пользователь без использования без всякого железа мог «пощупать» работу ПИД-регулятора.
Для этого создана матмодель нагревательного элемента с датчиком температуры и ПИД-регулятором (разумеется, с кучей упрощений, но без ущерба для реалистичности). Реализовано это на обычном Excel. С тем, чтобы любой пользователь мог сам «покрутить» виртуальные параметры, и посмотреть, что из этого выходит. Собственно, я эту модель в своё время и сделал как раз для того, чтобы «потрогать» своими руками процесс ПИД-регулирования.
Сама модель имеет следующие параметры:
- Кf инерционности нагреваемого тела (масса, уд. теплоёмкость, изоляция)
- Температура окружающей среды °С
- Начальная температура тела °С
ПИД-регулятор имеет параметры:
- Целевая температура °С
- Коэфф. пропорционального воздействия
- Коэфф. дифференциального воздействия
- Коэфф. интегрального воздействия
- Максимальное значение управляющего воздействия
- Общий коэффициент усиления (если 0, то регулятор и нагреватель не работают)
Дальше много картинок.
1. Сначала выключим ПИД-регулирование и убедимся, что модель адекватная.
Устанавливаем равную температуру тела и окружающей среды и убеждаемся на графике, что температура стабильна:

Теперь устанавливаем температуру тела выше температуры окружающей среды, график перестроился и видим, что температура тела по экспоненциальному закону стремится к температуре окружающей среды.
То же самое, но теперь температура тела ниже температуры окружающей среды.
Уменьшаем коэффициент инерционности, и видим, что температура тела быстрее стремится к окружающей среде.
Увеличиваем коэффициент инерционности, и видим, что температура тела медленнее стремится к окружающей среде.
Теперь включаем нагрев (но не ПИД-регулятор!). Для этого в колонке управления «включаем» 2 раза «нагрев» — с 0 по 2 единицу времени на «мощность» =20, и с 11 по 12 единицу времени на «мощность» =10. На графике наблюдаем адекватную реакцию.
Теперь «включаем» постоянный «нагрев» на «мощность» 10. Видим, что температура тела растёт, но до определенного предела — «мощности» не хватает.
2. Теперь «включим» ПИД-регулятор, и посмотрим, как он будет регулировать температуру.
Установим целевую температуру в 100°С и Kp=1,Kd=1,Ki=0.1
Увеличим Ki до 1, и увидим, что это не совсем полезно в данном случае.
Теперь уберем интегральную составляющую Ki и посмотрим — теперь регулировка не дотягивает до 100 градусов — мало «мощности» без интегральной составляющей.
Увеличим K и/или Kp — теперь «мощности» хватило, но без интегральной составляющей возникли высокочастотные колебания.
Ссылка на файл. Кому интересно — поиграйтесь.
Источник