- Как сделать робот-пылесос своими руками — 2 идеи сборки
- Материалы для сборки
- Идея №1: робот-пылесос из картона
- Идея №2: почти заводской робот
- МозгоЧины
- Как сделать продвинутую роботизированную руку
- Как сделать продвинутую роботизированную руку
- Шаг 1: Сравнение производительности аналогов
- Шаг 2: Компоненты
- Шаг 3: Сборка пальцев
- Шаг 4: Сервопривод
- Шаг 5: Управление
Как сделать робот-пылесос своими руками — 2 идеи сборки


В современном ритме жизни не всегда получается поддерживать в доме чистоту. В этом деле поможет современные технологии. Робот-пылесос появился более 15 лет назад. Его типовой внешний вид напоминает крупную шайбу, которая передвигается по комнате по заданному алгоритму или случайным образом (пока на что-нибудь не наткнется) и собирает мусор. Предлагаем вам изучить 2 пошаговые инструкции, позволяющие сделать робот-пылесос своими руками.
Материалы для сборки
Итак, для сборки робота-пылесоса нужно разобраться с его составными частями, пойдем по порядку. Он должен сам передвигаться по комнате, поэтому нужны двигатели, в зависимости от конечной конструкции их должно быть от 2-х до 4-х, а также возможность переключения направления вращения и скорость, значит, нужна плата для управления двигателями. Если вы используете двигатели постоянного тока, то нужна плата с 4-мя транзисторами (H-мост).
Самодельный робот-пылесос должен определять столкновения со стенами и мебелью. Для этого нужно предусмотреть датчики препятствия и концевые выключатели на «бампере». Также нужен сам рабочий орган – пылесос. При этом он должен быть рассчитан на работу от постоянного тока низкого напряжения (например, 12В).
Кроме пылесоса нужна подвижная (вращающаяся) щетка, которая будет отчищать поверхность, поднимать ворс половика, сметать мусор. Для этого нужен еще один или два моторчика.
Система, которая будет всем этим управлять. Простейший вариант на Arduino. Для такой задачи подойдет любая из плат, по размерам удобно разместить вариант Nano или Pro mini.
Идея №1: робот-пылесос из картона
Основа робота делается из плотного картона. Его лучше склеить в пару слоев, а волокна разместить перпендикулярно. Для его технической начинки нужен такой набор деталей:
- Любая плата Arduino.
- Breadboard или простая макетная плата, в принципе можно и без неё, всё просто спаять.
- 2 ультразвуковых датчика расстояния (дальномер).
- Турбина от пылесоса.
- Небольшой двигатель или кулер от компьютера.
- Двигатели с редукторами и колеса.
- Контроллер для двигателя.
- Провода для соединений схемы.
- Аккумуляторы и контроллер заряда.
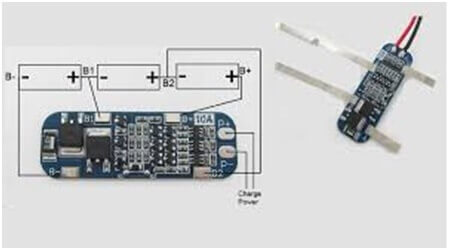
В качестве питания для робота нужно использовать 3 литиевых аккумулятора. Напряжение каждого из них 3,7 В. Для их заряда нужен контроллер. Например, такой как на фото:
Для управления двигателями привода робота удобно использовать модуль на L298-микросхеме. Схемотехнически это H-мост, вы можете его собрать своими руками из отдельных компонентов, но купить готовую плату будет надежнее. С его помощью вы можете задавать скорость движения робота-пылесоса и изменять направление вращения.
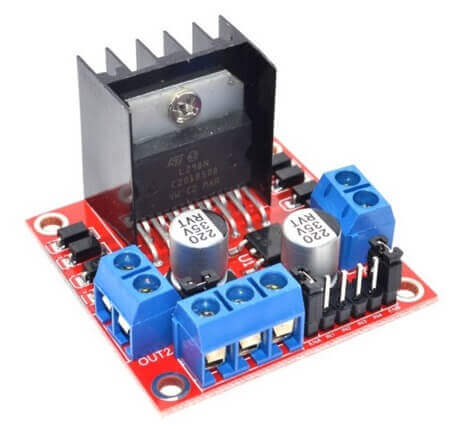
Для регулировки скорости на пин ENA или ENB подаётся ШИМ сигнал, а для задания направления вращения подают разноименные сигналы на IN1 и IN2 для одного двигателя и IN3, IN4 для другого двигателя. При этом если на пине IN1 у нас логическая единица, а на пине IN2 – логический ноль, двигатель крутится в одну сторону, чтобы сменить направление нужно поменять местами 1 с 0. Его нужно собрать с ардуино по такой схеме (пины можно использовать любые, это вы укажете в скетче).

Схема на ардуино
Далее нужно делать основу из картона и закрепить на ней колеса, должно получиться что-то вроде этого:

Основа из картона
Вот вид с нижней стороны. Два ведущих колеса с угловым редуктором и поворотное колесо:

Теперь нужно собрать схему, которая монтируется на основание. Диаметр основания должен быть около 30 см, чтобы туда влезла и электроника и сам блок пылесоса.

Вместо дальномеров можно использовать вариант с бамперами, которые соединены с концевыми выключателями. При столкновении с препятствием система управления даст сигнал о смене направления движения.

Контактные бампера можно сделать и своими руками, для этого нужен тонкий, но жесткий провод, например от витой пары. Для этого формирует контактную площадку на внутренней стороне бампера из фольги, и закрепляем проводник как это показано ниже. При столкновениях робота-пылесоса с мебелью и стенами они будут соприкасаться. Вам остается отрегулировать расстояние от проволоки до фольги, чтобы добиться нужной чувствительности и исключить ложные срабатывания. На фольгу подается 5В, а провод идёт на вход Ардуино, подтянутый к минусу через резистор на несколько кОм.

Самодельный контактный бампер
Устройство питается от аккумуляторов, для питания системы управления можно применить линейные стабилизаторы типа l7805. Чтобы отрегулировать скорость вращения моторов подойдет понижающий преобразователь, например LM2596.


Самое сложное — это сконструировать и собрать пылесос. Вот его приблизительный чертеж:
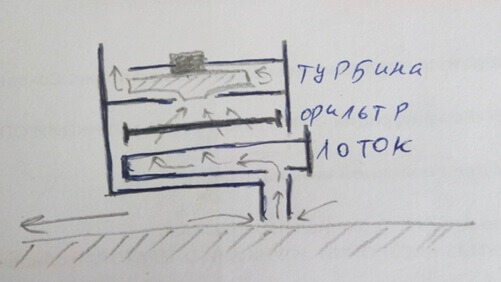
Отламываем родные лопасти от кулера, и закрепляем на его роторе турбину от пылесоса. Важно закрепить турбину точно в центре, иначе вы получите дисбаланс и вибрации.

Вот так выглядит обратная сторона турбины, закрепленной на роторе кулера. Закрепить её можно на термоклей или на суперклей

Вид турбины изнутри
Вот и вся пошаговая инструкция по сборке робота-пылесоса, сделанного из подручных материалов. Алгоритм его работы такой: робот-пылесос едет вперед, пока не встретит препятствие. После столкновения (или приближения, если вы используете УЗ дальномеры) останавливается, отъезжает назад на заданное расстояние, разворачивается на произвольный угол и едет дальше.
Идея №2: почти заводской робот
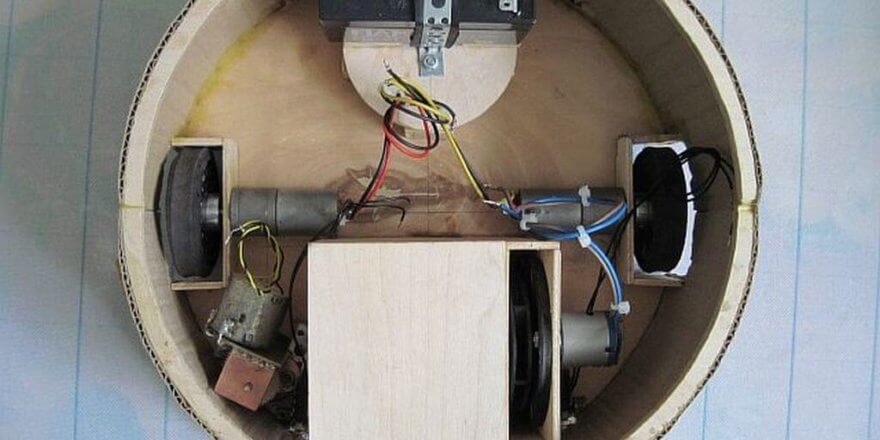
Предлагаем вашему вниманию не более сложный проект робота-пылесоса. Вот его внешний вид в собранном состоянии:
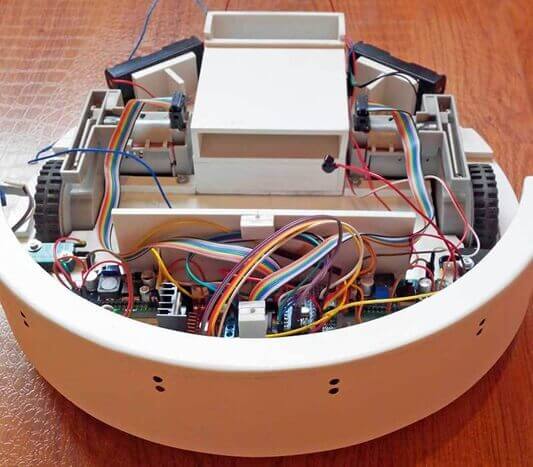
Самодельный роботизированный пылесос
Система навигации в нем собрана из комплекта 6-ти ИК-датчиков препятствия. На случай, если не сработал ни один из них, то предусмотрены два контактных датчика (концевых выключателя). Система управления двигателями на таком же драйвере с микросхемой L298N. Для его сборки вам понадобится:
- Плата Ардуино, в оригинале использовалась Pro-mini.
- USB-TTL переходник для прошивки этой модели ардуино. Если вы будете использовать Arduino Nano, то он не нужен, т.к. в ней есть возможность прошивки по USB.
- Драйвер для моторчиков L298N.
- Моторчики для колес с редуктором.
- 6 ИК-датчиков.
- Моторчики для турбины (по возможности помощнее).
- Крыльчатка турбины пылесоса.
- Моторчики для щеток могут быть любыми.
- 2 датчика столкновения.
Всё это собрать по такой схеме:
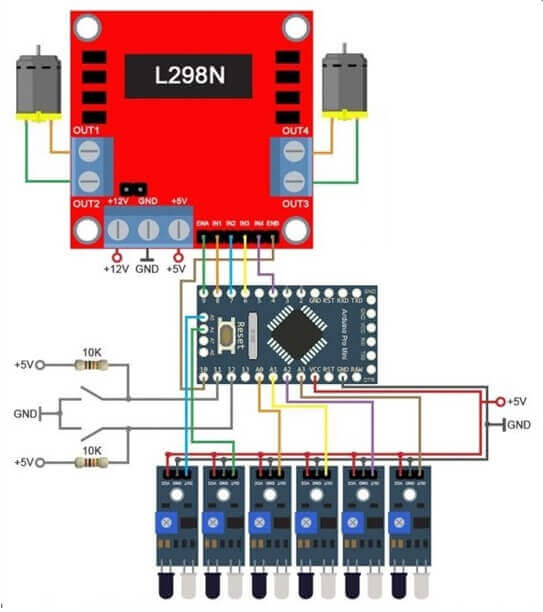
Схема сборки робота-пылесоса
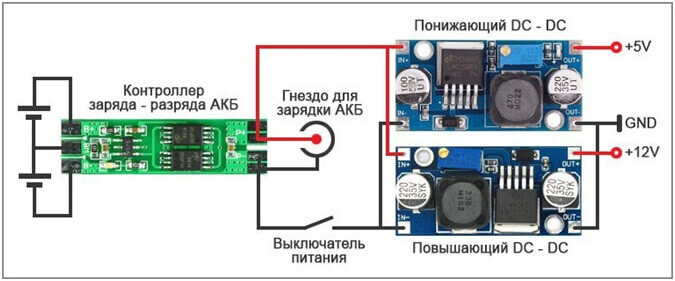
Для сборки цепи питания робота-пылесоса нужны:
- 4 литиевых аккумулятора, подойдут типа 18650.
- 2 преобразователя постоянного напряжения (повышающий и понижающий).
- Контроллер для заряда и разряда 2-х аккумуляторов (искать в интернете по запросу 2s li-ion controller). В схеме используется последовательное включение двух параллельно включенных банок, в итоге их выходное напряжение получается больше 7,4В, а параллельная цепочка нужна для повышения ёмкости и автономности работы.


Вот схема питания этого робота:
Кроме этого нужен пластик (ПВХ) или любой другой материал для корпуса робота, можно его распечатать на 3D-принтере, если у вас есть такая возможность.
Для работы самоделки нужна прошивка, вот пример алгоритма хаотичной уборки, мы взяли его с сети. Ссылка для скачивания скетча: прошивка для робота-пылесоса.
В этой статье были рассмотрены 2 конструкции робота-пылесоса, которые можно повторить и собрать своими руками. Сделать автоматическое средство для уборки помещения можно, вложившись в бюджет от 30 до 100 долларов. Самыми дорогими деталями являются аккумуляторы, двигатели и платы ардуино. Если у вас получилось собрать самодельный робот-пылесос или вы придумали другую конструкцию, присылайте примеры в комментарии, будем рады открытому общению!
Напоследок рекомендуем просмотреть видео, на которых наглядно демонстрируется еще несколько идей, как сделать робот-пылесос в домашних условиях:
Источник
Сайт про изобретения своими руками
МозгоЧины
Сайт про изобретения своими руками
Как сделать продвинутую роботизированную руку
Как сделать продвинутую роботизированную руку

Доброго дня, мозгоинженеры! Это мозгоруководство расскажет вам как своими руками создать высококачественную роботизированную руку, причем с малыми затратами по себестоимости.
Данная «open source» мозгоподелка превосходит аналогичные робо-руки не только по цене сборки, но и по производительности, и не уступает даже промышленным. А если использовать в ней биоэлектрическое управление, то она достаточно легко выполняет захват различных предметов, таких как электроотвертка, крышка или батарейка.
Шаг 1: Сравнение производительности аналогов
Как уже было сказано, данная самоделка не уступает промышленным аналогам, и достигнуто это тщательным подбором компонентов. На первой представленной таблице показано сравнение характеристик двигателя, который используется в коммерческих робо-руках и выбранным мной.
Зная производительность двигателей из промышленных аналогов, я подобрал подходящий по мощности, но более дешевый двигатель, то есть сила сжатия пальцев моей робо-руки как и у промышленных. Но как показано на второй таблице, скорость пальцев моей мозгоподелки выше коммерческих аналогов, что облегчает захват предметов и повышает производительность. На третьей таблице показаны размер и вес компонентов робо-руки и аналогов, и исходя из них видно, что использование 3D компонентов облегчает общий вес поделки.
По сравнению с OpS (open source) аналогами сила захвата данной робо-руки в 2.5 раза больше, вес на 20% меньше, а ладонь примерно наполовину тоньше. То есть по характеристикам эта самоделка имеет преимущества для пользователя. Кроме того, пальцы робо-руки действуют более согласовано, суставы сгибаются пропорционально и надежно каждый раз, что обеспечивает поделке стабильное и производительное функционирование. Конструкция многих OpS аналогов проста – «сухожилие» просто проходит внутри пальца и стягивается по принципу лебедки, что приводит к неловким, резким движениям руки и несогласованности суставов.
И все же, несмотря на описанные преимущества, данная робо-поделка имеет и недостатки. Так напечатанные 3D компоненты более подвержены механическим повреждениям по сравнению с металлическими компонентами аналогов, то есть их проще сломать, но и при этом, проще отремонтировать. Еще в этой робо-руке отсутствует фиксирующий механизм, то есть необходимо постоянно прикладывать силу для удержания захвата, что снижает энергоэффективность.
Шаг 2: Компоненты
Конструкция этой робо-руки разрабатывалась на основе общедоступных и 3D-печатных компонентов, весь список которых, а также места приобретения, представлены в таблицах на мозгофото. Конкретные ссылки я не привожу из-за частой смены поставщиков, но если какой-либо компонент недоступен, то не бойтесь менять его на аналогичный!
Свои 3D-компоненты я распечатал с разрешением 0.2мм и 10% заполнением, что обеспечивает довольно быструю печать (около 14 часов) с необходимой прочностью получаемых деталей. Вам я тоже советую печатать детали для этой робо-поделки на максимальных значениях разрешения и заполнения вашего принтера.
Шаг 3: Сборка пальцев
Все пальцы, включая и большой, собираются однотипно, и этот процесс подробно показан на фото, а еще подробнее в инструкции.
На одном конце металлического тросика завязываем узел и скрепляем его каплей супер-клея, затем пропускаем тросик сквозь отверстие катушки до упора узелка. Пропускаем так, чтобы узелок оказался сверху катушки, а свободный конец выходил из нижнего отверстия.
Берем двигатель и нанизываем на его вал катушку, при этом нанизываем так, чтобы плоскость катушки плотно прилегла к плоскости вала, иначе есть риск повредить ее.
В элемент корпуса двигателя вставляем в небольшие отверстия два 6мм-х винта М2, аккуратно устанавливаем этот элемент на двигатель, находим нужное положение катушки/двигателя и закрепляем винтами.
Собираем элементы кончика пальца и связку, для крепления используем винты и гайки М2. При этом крепим не плотно, оставляя достаточную степень свободы суставам.
Через среднюю фалангу пропускаем связку и соединяем с верхней частью пальца, ориентируемся при этом на фото, а затем скрепляем 20мм-ми винтами М2 обе части пальца.
Далее соединяем связку с соответствующим отверстием в корпусе двигателя и закрепляем ее 12мм-м винтом М2, для этого потребуется полностью согнуть палец.
Соединяем палец с корпусом двигателя и через отверстие в нижней части скрепляем 20мм-м винтом М2.
Пропускаем свободный конец тросика внутри корпуса двигателя и через отверстие в нижней части пальца, завязываем узел, закрепляем его каплей супер-клея и обрезаем лишний конец тросика кусачками.
Повторяем все шаги с оставшимися пальцами, в том числе и большим, который хотя и имеет некоторое отличие в деталях, собирается аналогично. Когда все пальцы собраны, приступаем к ладони: берем пластину с 4 отверстиями, это задняя часть, и крепим к ней собранные пальцы на 6мм-ые винты М2. После этого устанавливаем переднюю пластину и закрепляем ее в двух местах к крайним пальцам 6мм-ми винтами М2.
Шаг 4: Сервопривод
Приступаем к окончательной мозгосборке. Берем сервопривод и вставляем в распечатанный для него суппорт, который должен плотно подходить к сервоприводу.
На большой палец монтируем кронштейн, который будет сцеплять его с сервоприводом и закрепляем 6мм-м винтом М2.
Кронштейн большого пальца соединяем с сервоприводом и закрепляем винтами, после этого прикладываем всю конструкцию большого пальца/сервопривода к передней пластине руки и в соответствующих местах скрепляем 6мм-ми винтами М2.
Механическая сборка завершена!
Шаг 5: Управление
Обычно современные протезы управляются биоэлектрическим контроллером, который считывает небольшие напряжения мышц, называемыми электромиографическими (ЭМГ) сигналами. Анализируя эти сигналы, контроллер понимает, какие мышцы задействованы, и, следовательно, какое положение должен принять протез. Для этого процесса требуется комплексный 8-ми канальный EMG чип и программный алгоритм обучения, который называется линейный дискриминантный анализ. Но это вопрос более продвинутого и ответственного применения самоделки, который требует больших познаний в электронике и программировании, а сейчас поступим проще.
Второй способ подходит для людей занимающихся компьютерными технологиями. Суть его в создании PID-контроллера или кнопочного управления для перемещения руки в различные положения.
На этом все, надеюсь было полезно. Удачи в вашем мозготворчестве!
( Специально для МозгоЧинов#Tact-Low-cost-Advanced-Prosthetic-Hand
Источник