Увеличиваем дальность полета любого квадрокоптера с AliExpress

Квадрокоптеры продолжают набирать армию поклонников. Сейчас в продаже можно найти годные бюджетные модели, с которыми просто овладеть навыками пилотирования и при этом не угробить дорогостоящего дрона.
На AliExpress представлен довольно широкий выбор компактных и недорогих квадрокоптеров, а также предлагают комплектующие и запчасти, которые понадобятся в случае ремонта.
У большинства подобных моделей есть один существенный недостаток – ограниченный радиус полетов. Облететь дом или заглянуть в окно к соседу еще получится, а вот несколько железобетонных препятствий сразу прервут связь пилота с моделью.
Даже при прямой видимости дрона улететь дальше 40-50 метров получится не всегда.
Предупреждаем: информация далее размещается только в ознакомительных целях. Все действия с квадрокоптерами вы выполняете на свой страх и риск.
Какую связь используют квадрокоптеры

Управление дронами осуществляется через комплектный пульт ДУ или смартфон.
Большинство квадрокоптеров используют для связи радиоканалы на частотах 2.4 или 5.8 ГГц. В первом случае девайсы стоят дешевле, но на их работу влияют вездесущие помехи в виде смартфонов, Wi-Fi роутеров и других бытовых приборов.
Передачу сигнала на частоте 5.8 ГГц применяют в основном в дорогих профессиональных квадрокоптерах, так и помех меньше, и радиус полетов может быть больше.

Практически все бюджетные модели с Ali работают на частоте 2.4 ГГц, дрон при этом выступает в качестве Wi-Fi точки доступа, а пульт или смартфон, с которого происходит управление, подключается к нему.
Некоторые модели могут одновременно держать связь и с пультом ДУ, и со смартфоном. Первый при этом отвечает за управление, а на второй выводится сигнал со встроенной камеры.
Что плохого в работе по Wi-Fi 2.4 ГГц

Даже на открытой местности дальность работы дронов редко превышает 50-60 метров. Самые недорогие отлетают от пилота лишь на 20-30 метров.
Если попытаться управлять квадрокоптером глядя в экран смартфона, авария не заставит себя долго ждать. Даже на небольшом расстоянии видеосигнал может потеряться или появится заметная задержка.
Насладиться так называемым FPV (first person view) получится лишь на небольшом расстоянии.
Ни о каких полетах с VR-шлемом можно и не мечтать, хотя многие продавцы на AliExpress активно продвигают эту фишку.
Как увеличить радиус действия таких квадрокоптеров
Все очень просто, не нужно ничего делать с дроном, разбирать его, крепить на него внешние антенны или усилители сигнала.
Вам понадобится лишь вот такой гаджет:

Это усилитель сигнала Wi-Fi, который работает в режиме ретранслятора, увеличивая зону покрытия сети.
Его можно включить в квартире и разместить у окна, если летать возле дома либо взять с собой. Штука компактная и работает от любого PowerBank, например от такого:

Можно взять с собой и летать в любом месте.
Работает все следующим образом:
1. Собираем квадрокоптер, устанавливаем аккумулятор и включаем его.
2. После того, как дрон создал сеть Wi-Fi, подключаемся к ней со смартфона.
3. В приложении Mi Home, через которое осуществляется настройка Mi Amplifier, выбираем усилитель Wi-Fi и активируем функцию ретранслятора.
Теперь «стик» Xiaomi будет усиливать сеть, раздаваемую квадрокоптером.
Имейте ввиду, что держать усилитель рядом с собой будет бессмысленно. Если дрон не достанет сигналом до смартфона, то и до репитера вряд ли добьет.
PowerBank с подключенным Mi Amplifier нужно расположить между пилотом и предполагаемой зоной полетов.
Работать все это будет при условии, что квадрокоптер управляется со смартфона. Радиус работы радиопульта не увеличится.
Некоторые модели управляются при помощи пульта ДУ, но для вывода картинки для FPV используется Wi-Fi сеть. Смартфон подключается к ней и выводит изображение с камеры дрона.

В таком случае радиус полетов не увеличить, но можно получить более уверенную картинку с камеры на смартфон и меньшую задержку при передаче сигнала.
Вот такой простой способ немного прокачать китайские квадрокоптеры.
Источник
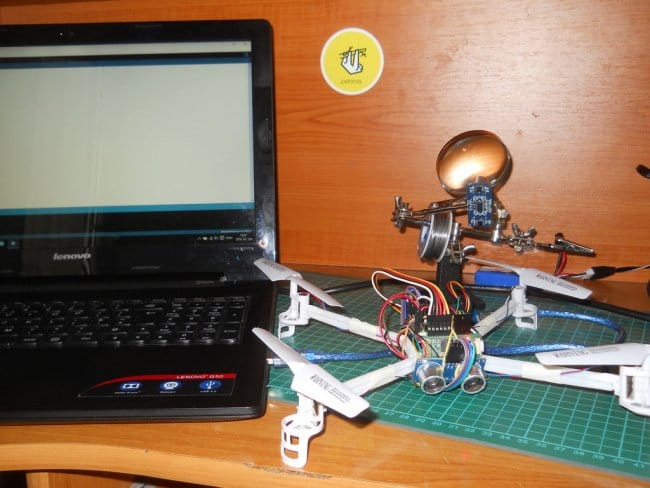
Самодельный летающий дрон с камерой, который следует за вами на автопилоте (на основе Arduino)


В наши дни дроны — это очень популярные игрушки. На рынке можно найти профессиональные летающие дроны и дроны для любителей. У мастера, автора данной статьи, есть четыре беспилотника (квадрокоптеры и гекскоптеры), потому что он любит все, что летает, но 200-й полет не так интересен и становится скучно, поэтому он решил создать свой собственный дрон с некоторыми дополнительными возможностями. Мастер любит программировать на Arduino и проектировать схемы и гаджеты, поэтому он начал его строить. В самоделке использован контроллер полета MultiWii, основанный на чипе ATMega328, который также используется в Arduino UNO, поэтому программирование довольно простое. Этот беспилотник может быть подключен к смартфону на Android, который отправляет свои данные GPS на беспилотник, который сравнивает эти данные с его собственным сигналом GPS, а затем начинает следовать за телефоном. Поэтому, если двигаться по улице, дрон будет следует за вами. Конечно, есть много недостатков, однако дрон следит за телефоном, снимает видео, а также имеет ультразвуковой датчик расстояния, чтобы избежать препятствий в воздухе. Это особенности самодельного беспилотника.
Шаг 1: Основные свойства

Дрон работает почти полностью автоматически, вам не нужно управлять им, потому что он следует за вашим телефоном, который обычно находится всегда с вами, ультразвуковой датчик помогает обходить деревья, здания и другие препятствия, а GPS выдает очень точные данные о местоположении, но давайте посмотрим, что мы имеем в итоге:
— Аккумулятор 1000 мАч, хватает на 16-18 минут непрерывного полета;
— ультразвуковой датчик, чтобы избежать препятствий в воздухе;
— Модуль Bluetooth для получения данных с телефона;
— Микроконтроллер на основе Arduino;
— встроенный гироскоп;
— регулируемая максимальная высота (5 м);
— при низком заряде батареи, дрон автоматически падает на телефон; (желательно держать телефон в руках)
— затраты на постройку дрона около 100 долларов;
— можно запрограммировать на что угодно;
— с помощью GPS можно отправить беспилотник по любым координатам;
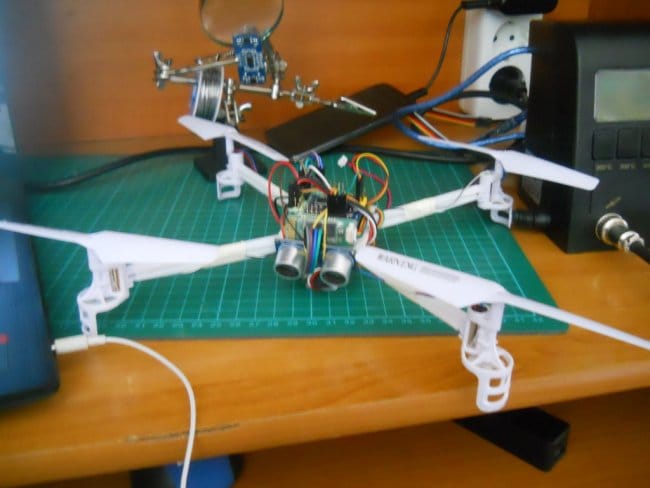
— дизайн в стиле квадрокоптера;
— оборудован 2-мегапиксельной видеокамерой 720p HQ;
— весит 109 г;




— Паяльник;
— Клей-пистолет;
— резец;
— Кусачки;
— Супер клей;
— Двухсторонняя клейкая лента;
— Резинки;
— MultiWii 32kB Flight Conroller;
— Модуль последовательного GPS;
— Серийный I2C конвертер;
— Модуль Bluetooth;
— Ультразвуковой датчик;
— Кусок жесткой пластмассы;
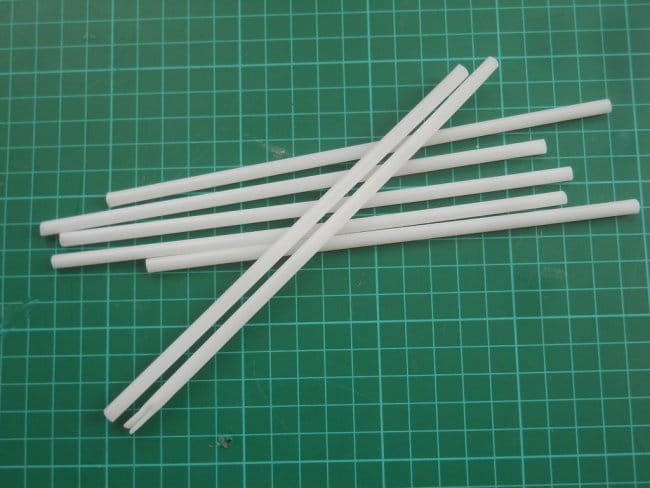
— Соломинки из кафе;
— зубчатая передача;
— Двигатели;
— Пропеллеры;
— Винты;
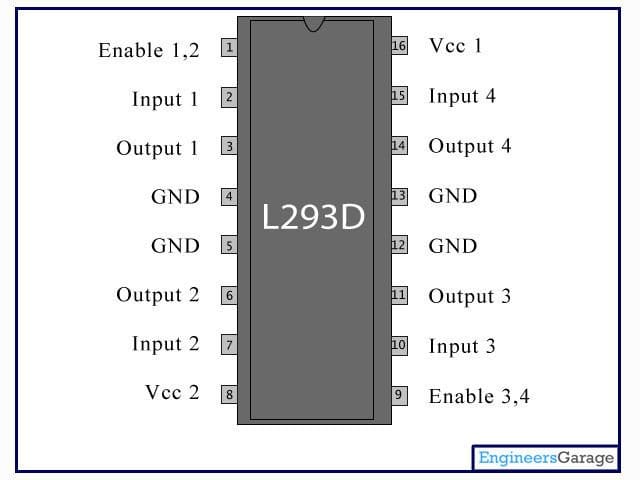
— L293D Motor Driver (это был неудачный выбор драйвера, будет исправлено во второй версии);
— 1000 мАч литий-ионный аккумулятор;
Шаг 3: Сборка пропеллеров
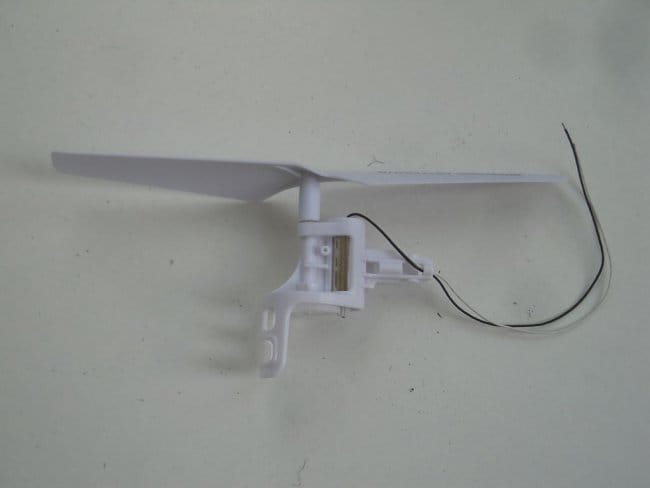

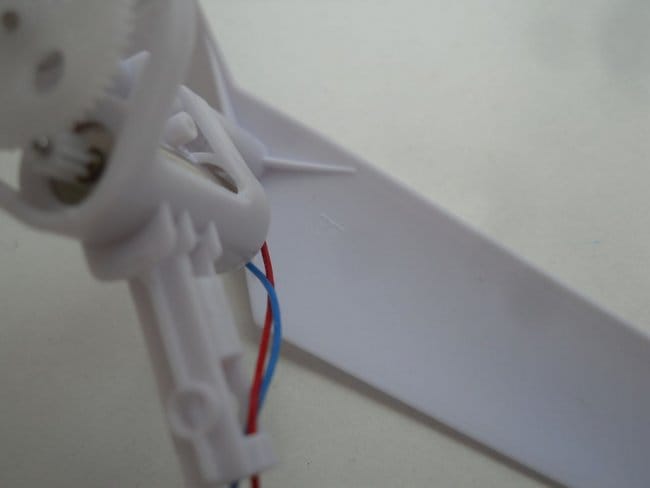

Мастер купил эти пропеллеры с моторами на Алиэкспресс, они являются запасными частями для дрона Syma S5X, но они оказались полезными и для данной самоделки.
Шаг 4: Принципиальная схема
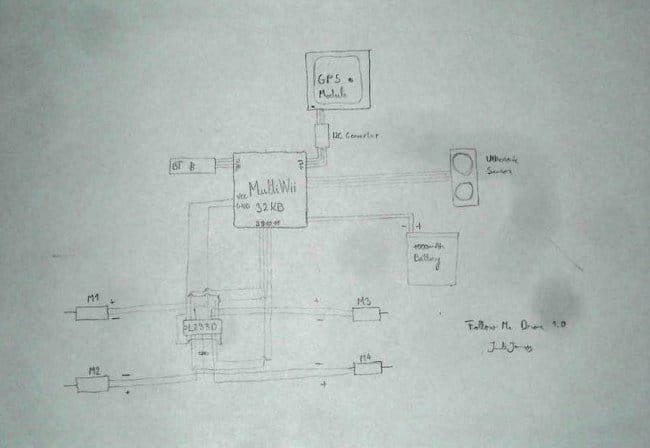
Всегда смотрите на схему во время работы и будьте осторожны со связями.
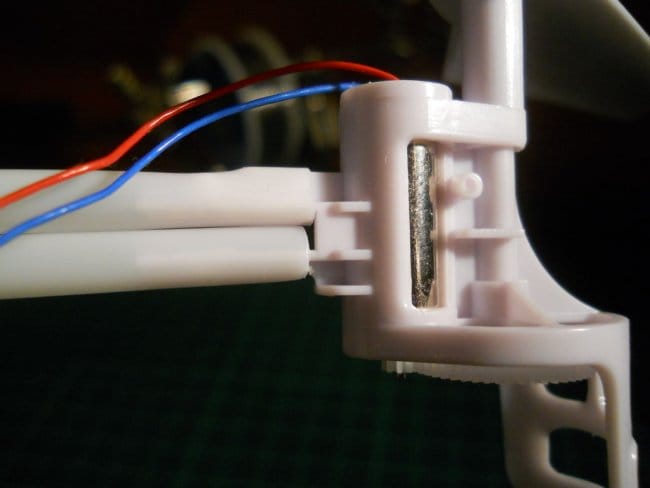
Шаг 5: Пайка двигателей к драйверу управления


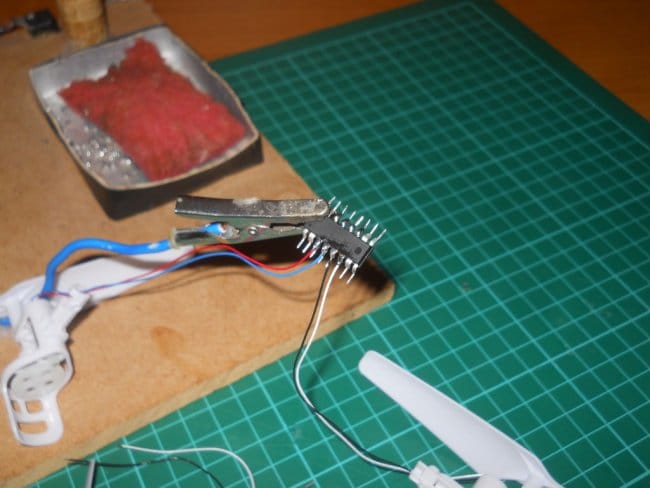
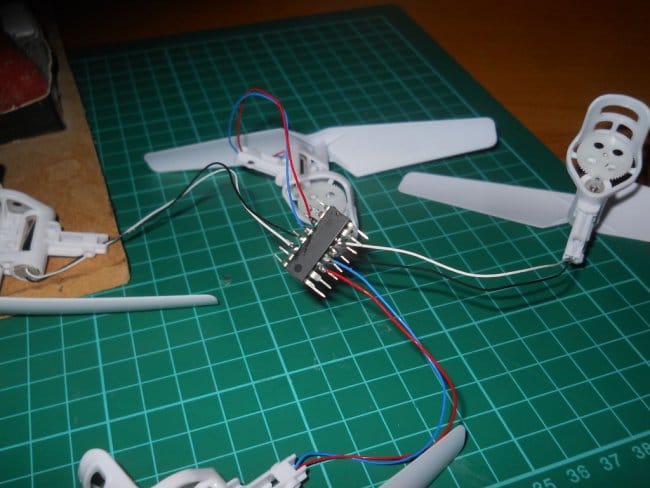

Теперь вам нужно спаять все кабели от двигателей до ИС драйвера двигателя L293D. Посмотрите на картинки, они говорят гораздо больше. Вы должны подключить черный и синий провода к заземлению и положительные провода к выходам 1-4. L293D может управлять этими двигателями, но мастер рекомендует использовать силовые транзисторы, потому что этот чип не может работать со всеми четырьмя двигателями при высокой мощности (более 2 А).


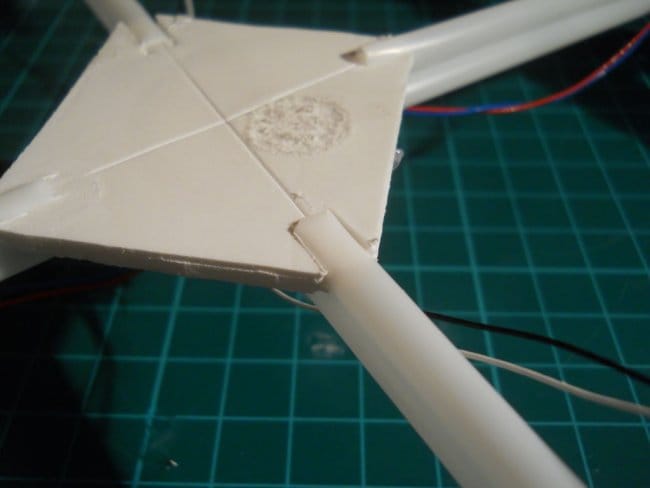
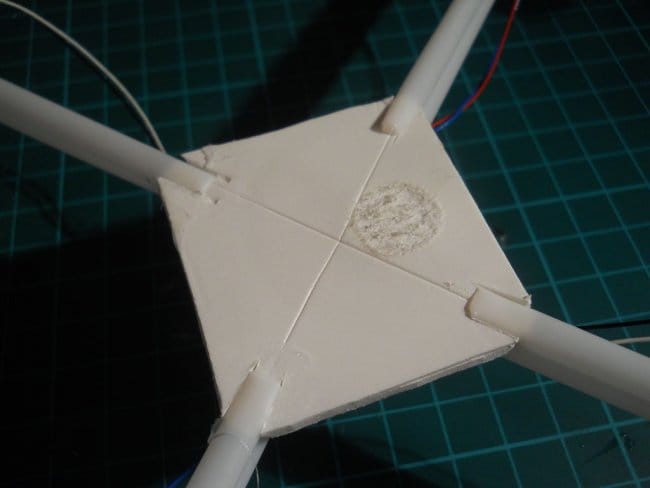
Пожалуйста, обратите внимание на вторую картинку, на которой показано, как оборудовать пропеллеры. Используйте крепкие трубочки-соломинки из кафе и кусок пластмассы для сборки рамы. Используйте немного горячего клея и супер клея для всех четырех винтов, затем проверьте соединения. Очень важно, чтобы пропеллеры находились на одинаковом расстоянии друг от друга.
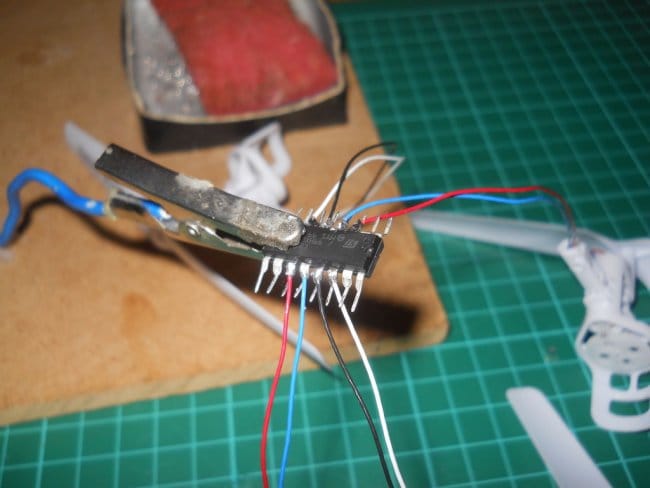
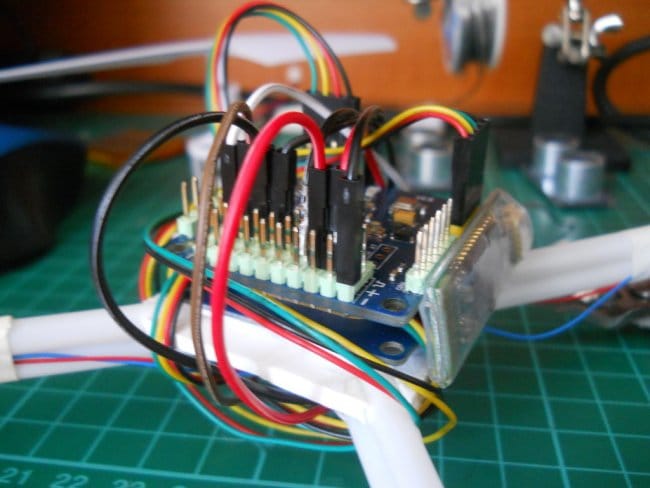
Шаг 7: Добавление проводов к драйверу L293D




Припаяйте провода к оставшимся контактам микросхемы. Это поможет подключить контакты Arduino к входам / выходам. Теперь пришло время построить схему.
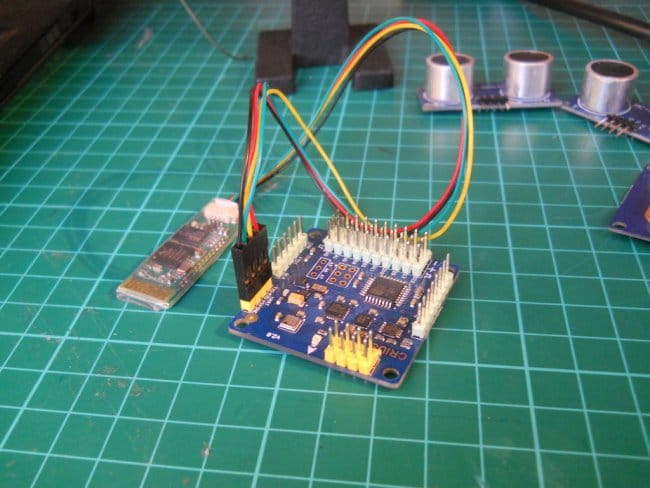
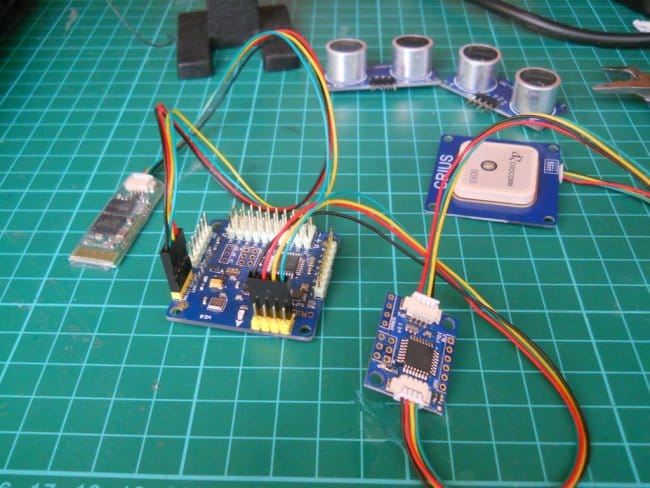
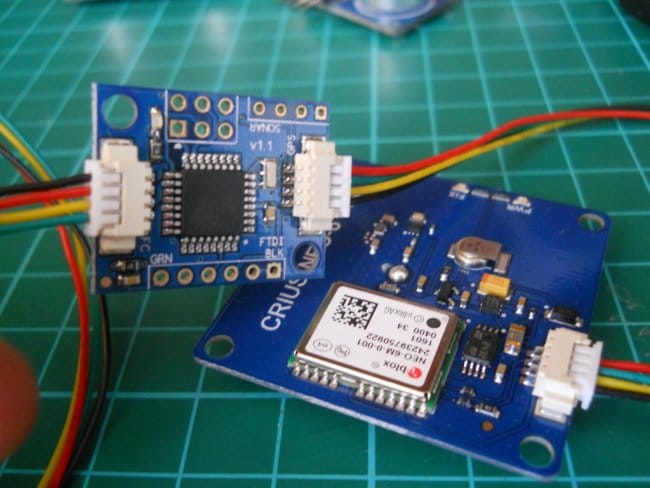
Все модули включены в комплект контроллера полета, который мастер заказывал заранее, так что просто нужно соединить их вместе. Bluetooth идет к последовательному порту, сначала GPS в преобразователе I2C, затем в порту I2C. Теперь данную схему можно установить на свой дрон.
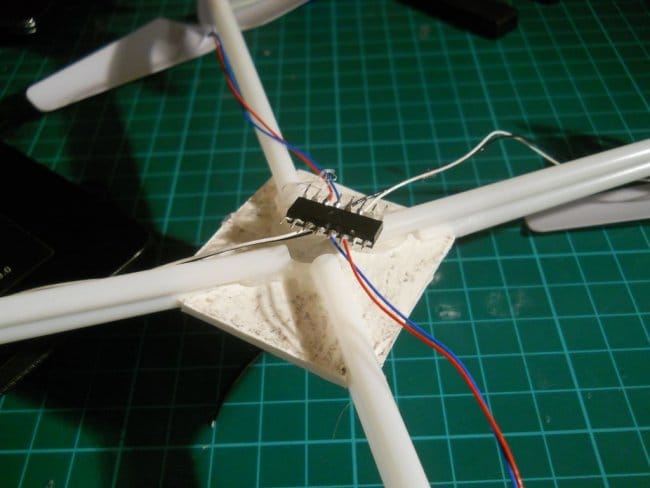
Шаг 9: Крепление электрической цепи к раме


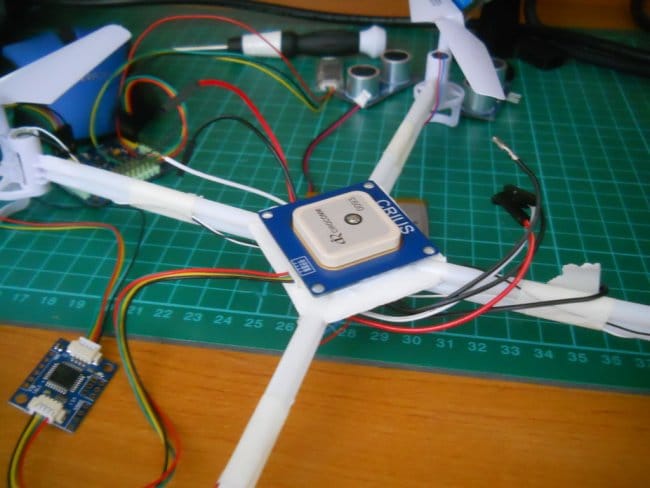

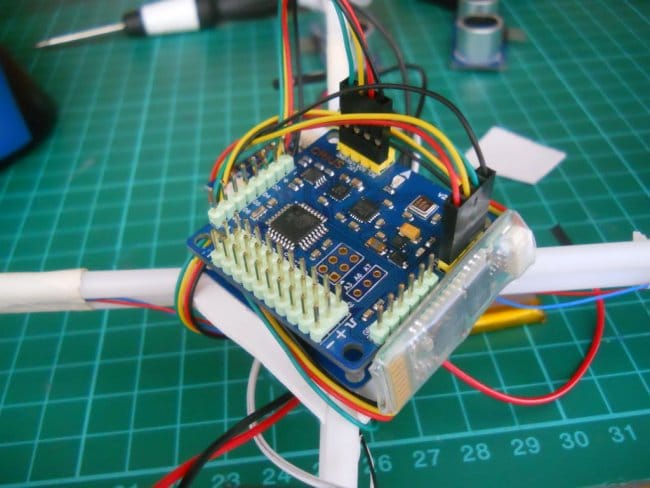
Используйте двустороннюю ленту и сначала добавьте GPS. Эта губчатая лента удерживает все на месте, поэтому приклейте каждый модуль один за другим на пластиковую деталь. По окончанию следует подключить контакты привода двигателей к MultiWii.
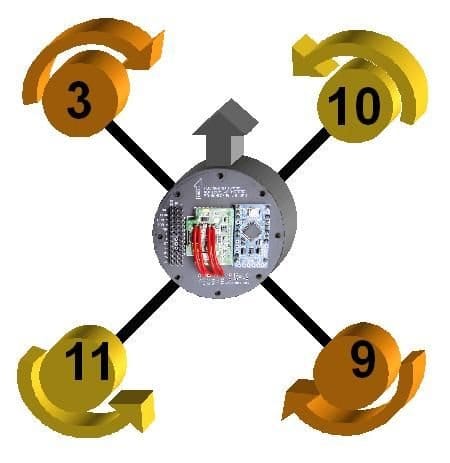
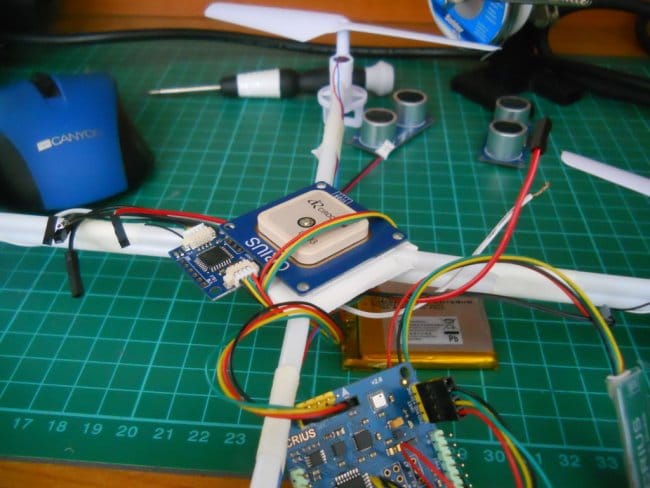
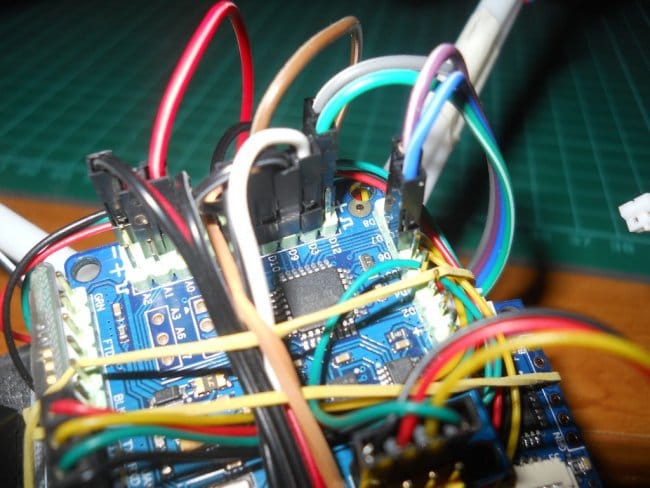
Шаг 10: Соединение двух цепей


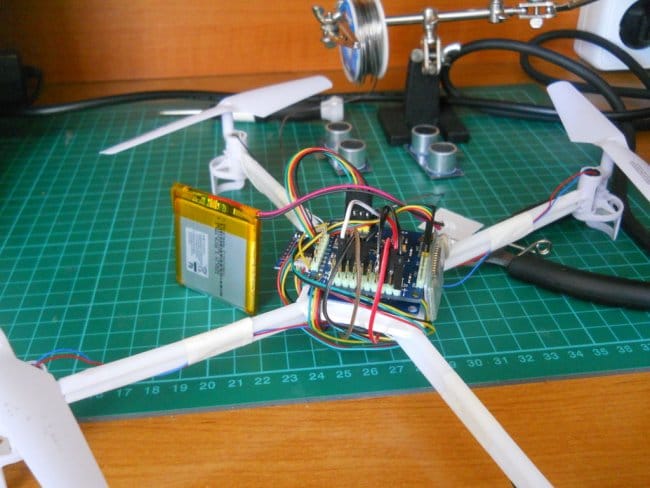
Входные контакты поступают на D3, D9, D10, D11, остальные должны быть подключены к контактам VCC + и GND.



Мастер использовал несколько резиновых лент, чтобы прикрепить батарею к дрону. Держится довольно крепко.
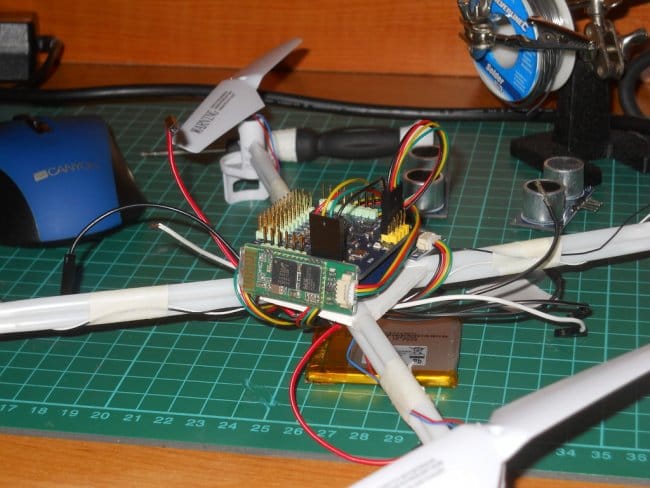
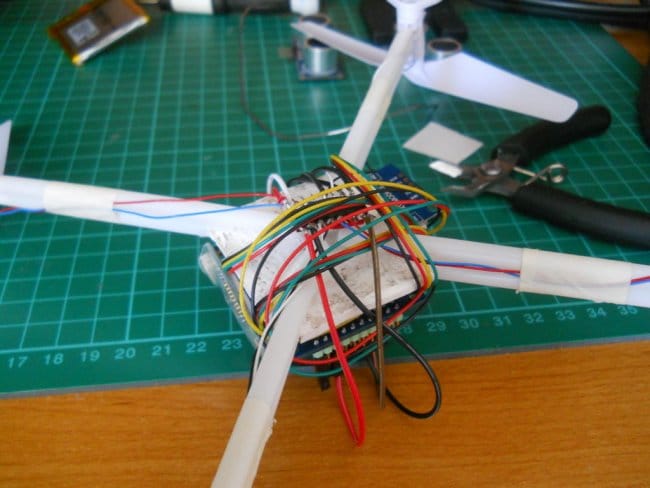
Шаг 12: Ультразвуковой датчик

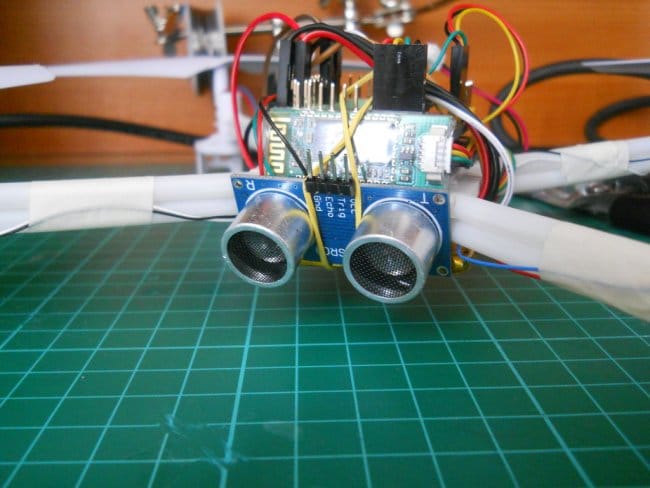
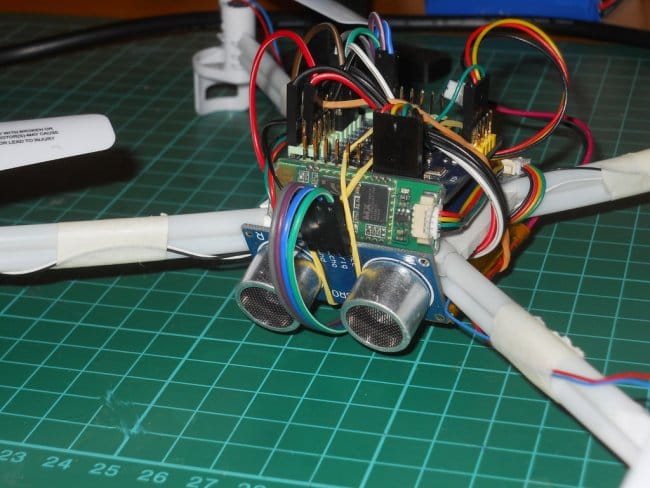
Датчик гидролокатора закреплен на дроне резиновой лентой и подключен к контактам D7 и D6 контроллера MultiWii.
Шаг 13: Программирование чипа
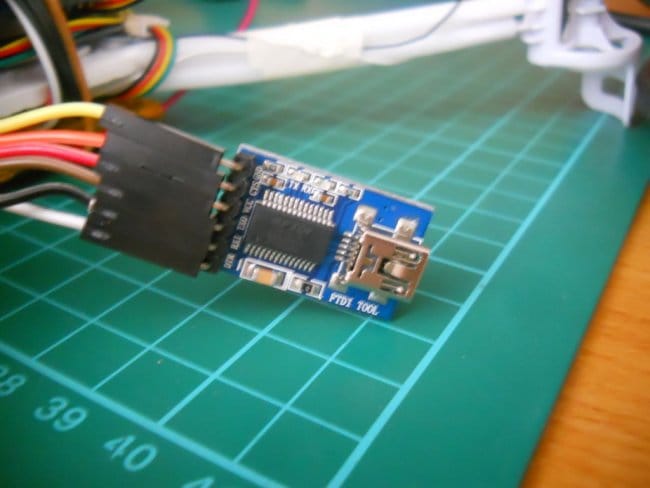
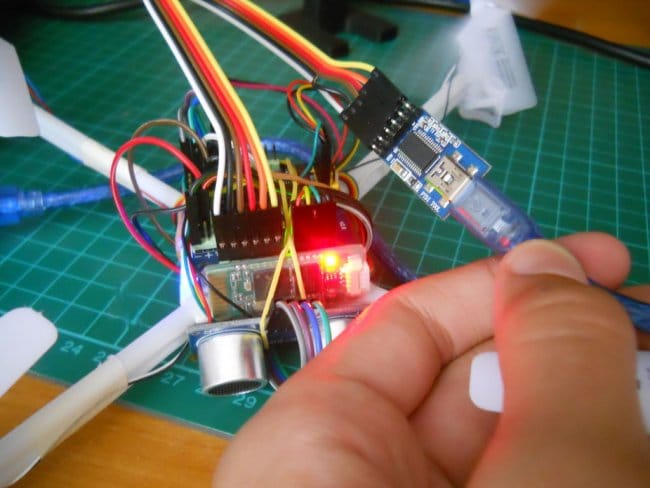
Вы должны использовать модуль Serial FTDI для программирования чипа. В комплект чипа входит модуль программатора.
Шаг 14: Программное обеспечение
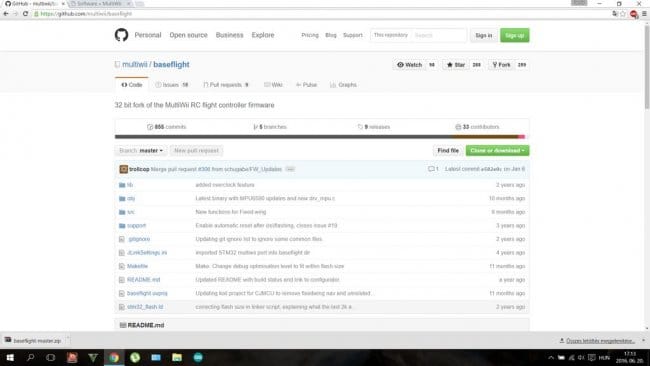
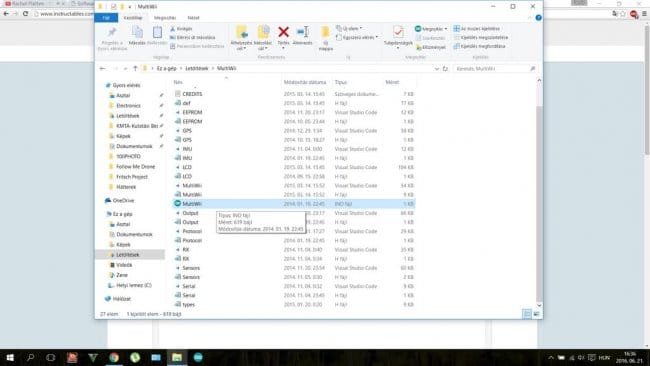

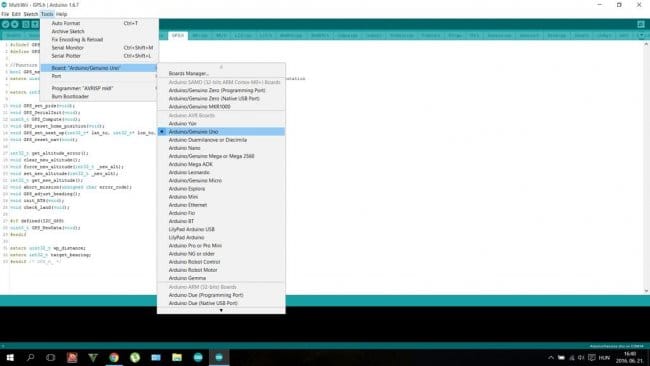
Мастер не знает, загружено ли программное обеспечение на чип или нет, но здесь он объясняет, что делать. Сначала загрузите официальную библиотеку MultiWii на свой компьютер. Извлеките файл .zip, затем откройте файл MultiWii.ino. Выберите «Arduino / Genuino UNO» и загрузите его на свой чип. Теперь ваш микроконтроллер имеет все предустановленные функции. Гироскоп, свет, Bluetooth и даже маленький ЖК-дисплей (который не используется в этом проекте) работает с загруженным кодом. Но этот код можно использовать только для проверки работоспособности модулей. Попробуйте наклонить дрон, и вы увидите, что моторы будут вращаться из-за гиросенсора. Нам следует изменить код контроллера, чтобы дрон следовал за телефоном.
Если вы можете запрограммировать Arduino или следовать инструкциям мастера, то сможете создать свой собственный дрон, который будет следовать за вами повсюду.
GitHub — ссылка на программное обеспечение
Шаг 15: Изменение кода
Мастеру пришлось изменить код датчиков и контроллера, который давал подсказки для ATMega328, но теперь модуль Bluetooth выдает три GPS-координаты, и в зависимости от них движется дрон.
Шаг 16: Приложение для телефона
Мастер использовал приложение SensoDuino, которое можно загрузить из плей маркет гугла. Подключитесь к дрону через Bluetooth и включите GPS TX и регистрацию данных. После этого приложение телефона готово.
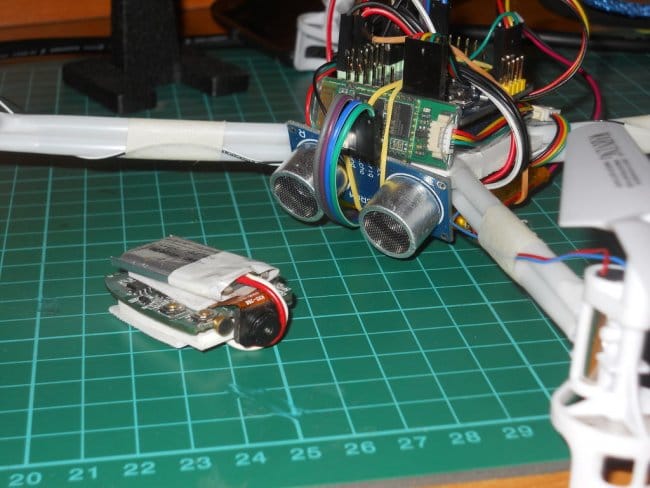
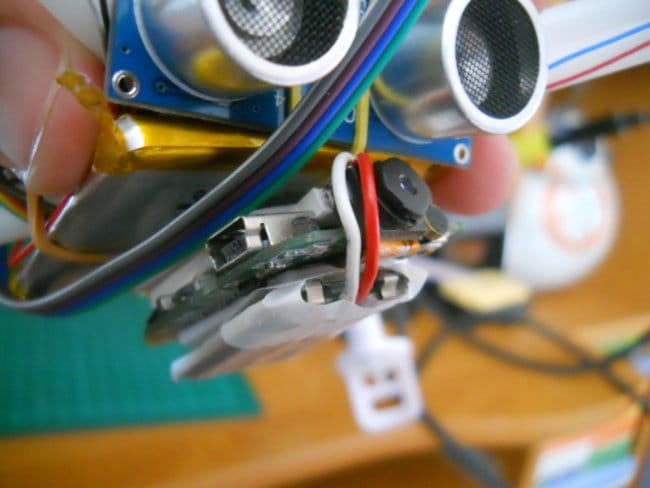
В качестве камеры использована дешевая китайская камера. Эта камера использовалась во многих проектах мастера и всегда показывала отличные результаты. Весит она всего 15 г и может снимать хорошее видео.
Шаг 18: Тестирование .



Расстояние соединения составило около 8 м, что более чем достаточно для такого беспилотника, как этот.
Источник