Самодельный ЧПУ станок
Разделы сайта
Интересное предложение

Лучшее
Статистика

Designed by:


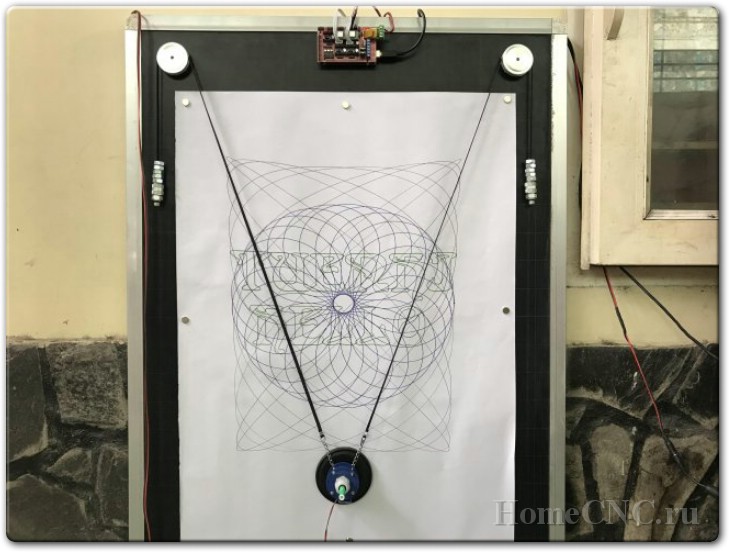
Вертикальный плоттер — это устройство для рисования и чертежния на больших вертикальных поверхностях.

В этой статье я расскажу вам про устройство и изготовление такого плоттера, а так же вы сможете найти ссылки на комплект для самостоятельной сборки с АлиЭкспресс.
Электронная часть собрана на базе Arduino с заливкой готового софта.
Механическая часть вертикального плоттера состоит из 2-х шаговых двигателей, держателя маркера с сервомашинкой (отодвигает маркер от доски, когда не надо рисовать) и нити с противовесами.

Рисует плотер за счет протяжки маркера по поверхности, соответственно рисунок состояит из линий и обычную фотографию надо предварительно подготовить.

Гораздо лучше чем фотографии, плоттеру удаются всевозможные чертежи и и рисунки созданные из кривых и прямых линий.
Размеры плоттера зависят только от длины нити и основания, если закрепить его на стене дома и разнести боковые части на углы под крышей, то можно разрисовать весь дом!
Вот пример рисования векторного рисунка
В этой статье рассматривается изготовление самодельного вертикального плоттера для работы с бумагой формата А1 и меньше.
Давайте посмотрим небольшое видео с демонстрацией работы плоттера.
Инструменты и материалы для сборки самодельного чертикального плоттера
Можно взять готовый набор плоттера с АлиЭкспресс

Вы так же можете найти этот товар на AliExpress
Китайцы слегка упростили конструкцию, но суть и работоспособность осталась та же.
В первой части — рисует растровый рисунок (фотографию), после половины видео рисует векторный чертеж Железного человека.
Но, переходим к изготовлению вертикального плоттера
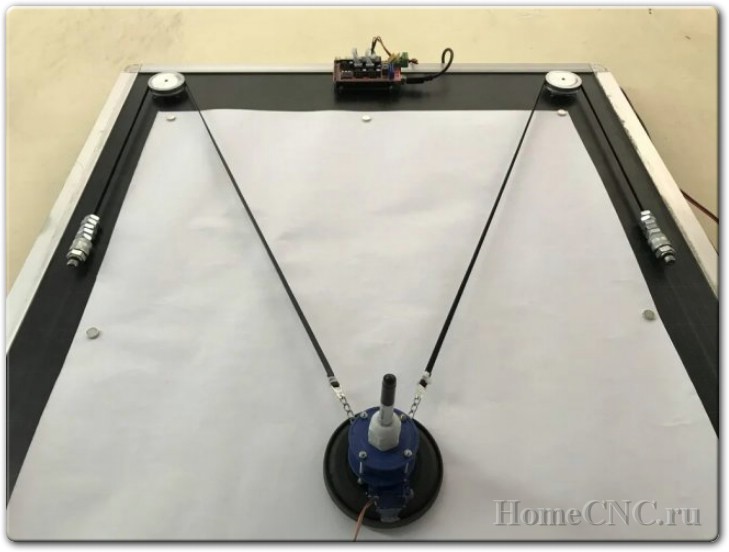
V-Plotter — это своего рода плоттер с ЧПУ, который рисует текст и изображения, перемещая перо по вертикальной поверхности. Он имеет простую механическую конструкцию, в том числе:
Одна доска.
Два шаговых двигателя со шкивами и ремнями.
Микро-сервопривод подъема ручки.
Пара противовесов.
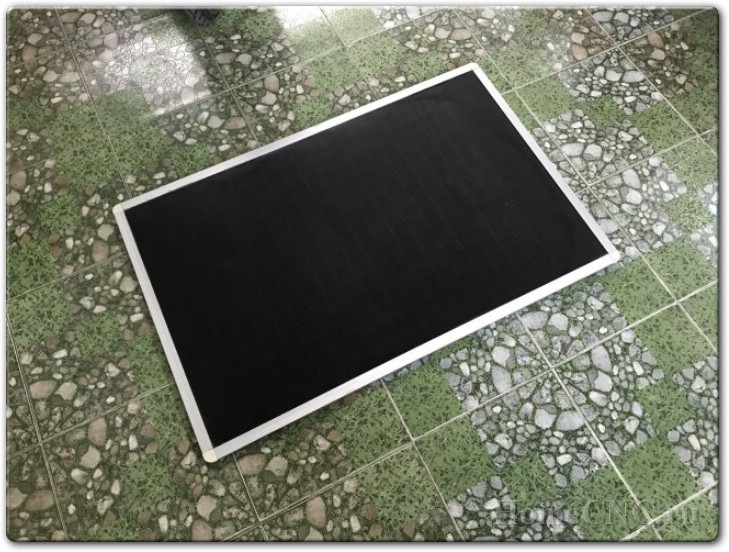
У мастера была классная доска размером 780 x 1200 мм, которой его дети больше не пользуются. Именно ее он и использует в качестве основания конструкции.
Размеры плоттера следующие:
Ширина: 550 мм.
Высота: 800 мм.
Длина ремня: 1000 мм.
Подготовка доски
Классная доска, включая алюминиевую рамку имеет размер 780 x 1200 мм. Толщина доски 30 мм. С одной стороны, по углам сверлятся отверстия для шаговых двигателей. Расстояние между центрами двух отверстий 600 мм.

С обратной стороны доски устанавливаются шаговые двигатели.

Устанавливаются на валы двигателей шкивы. Шкив имеет 80 зубьев. Шаг зубьев шкива GT2 80 составляет 2 мм на зуб, поэтому его диаметр равен 80×2 / PI = 50,955 мм.

Сверлятся 4 отверстия для крепления и устанавливается плата Arduino Mega 2560 + RAMPS 1.4 по центру верхней части доски.

Сборка узла держателя ручки
Основными компонентами для сборки держателя ручки являются: фитинг, кабельный ввод, ремень и гайки. Но, можно реализовать и свою конструкцию.



Сначала он разрезам 2-метровый ремень ГРМ на две части, каждая по 1 метру. На одной стороне ремня, с помощью кабельной стяжки, закрепляем металлическую цепочку. На другой стороне ремня закрепляем штуцер.

Внутрь катушки устанавливаем два кабельных ввода. Затем сверлим отверстия и устанавливаем четыре винта.

Дальше приклеиваем сервопривод внизу пластиковой катушки (со стороны металлического кабельного ввода) и припаиваем 3 провода от сервопривода к контроллеру RAMPS 1.4. Наконец, на шкивы шагового двигателя навешиваем держатель ручки. Проверяем перемещение узла.

Во время черчения держатель пера может трястись, поэтому необходимо добавить противовесы изготовленные из гаек М10.

Закрепляем пластиковую колесо диаметром 100 мм и толщиной 10 мм.

Приклеиваем сервопривод к колесу и регулируем рычаг сервопривода так, чтобы он находился как можно ближе к кончику пера.

Устанавливает карандаш и проверяет работу.


В таком виде вертикальный плоттер рисует просто отлично.
Подключение электроники вертикального плоттера
Основными контроллерами вертикального плоттера являются Arduino Mega 2560 и RAMPS 1.4. Они управляют 2 шаговыми двигателями через драйверы A4988 и одним серводвигателем. Вот эскиз подключения устройства.
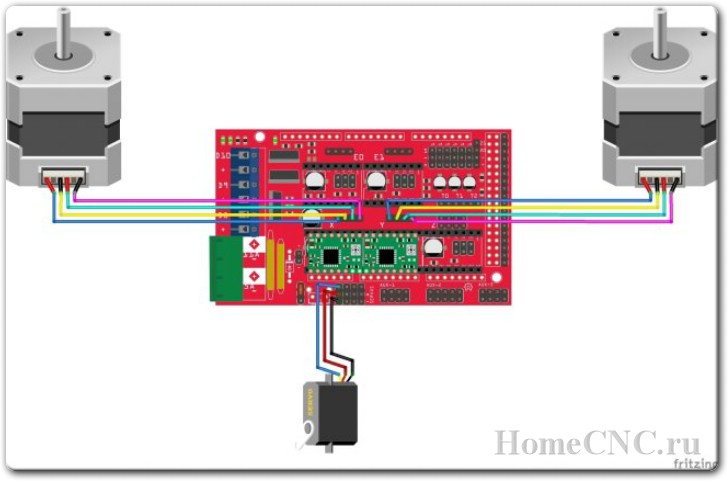
Для правильной работы плоттера два шаговых двигателя должны вращаться в противоположных направлениях, поэтому необходимо поменять местами провода правого двигателя. Подключаются шаговые двигатели левый на шильд X, правый на шильд Y.
RAMPS 1.4 имеет четыре штекерных разъема для подключения сервопривода: D11, D6, D5 и D4. Сервопривод подъема пера управляется штифтом D11.
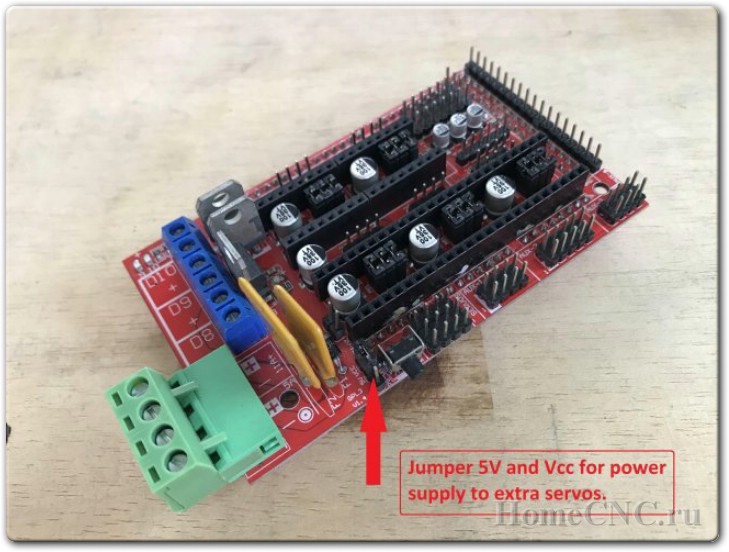
Что касается источника питания сервопривода, соединяем контакты Vcc и 5V вместе с помощью перемычки. Разъемы 5V и Vcc для питания сервопривода расположены рядом с кнопкой RESET. Это позволить питать плату от платы Ардуино. На фото ниже стрелкой указано место установки перемычки.
Для программирования использовался кабель от принтера HP длиной около 1,8 м. С обратной стороны доски закрепляется кабель-канал и провода кладутся в него.




Для работы плоттера использовалась прошивка Makelangelo — github . Прошивку Makelangelo можно использовать во многих различных контроллерах и кинематических системах.
- Вместе с готовым плоттером который можно заказать с АлиЭкспресс по ссылке выше, идет готовое ПО, которое не треует дорабток, прошивка уже злита в контроллер.
Для самодельного варианта необходимо внести несколько изменений в прошивку Mekalangelo, чтобы она была совместима с данным плоттером.
-Параметры конфигурации для вертикального плоттера: «configure.h «.
— Тип плоттера: Polargraph
— Контроллер: Arduino Mega 2560 + RAMPS 1.4
— Нет ЖК-дисплея
-Параметры конфигурации для полярографа: «robot_polargraph.h »
— Версия: MAKELANGELO_5
— С ручным подъемником.
— Без ЖК-дисплея — Без SDCard — Без концевых выключателей.
-Настройки шагового двигателя и шкива: «configMotors.h «.
— Он использовал шаговые двигатели NEMA 17 с углом шага: 1,8 °. Таким образом, количество шагов, необходимых для того, чтобы шаговые двигатели совершили 1 полный оборот: 200 шагов / оборот.
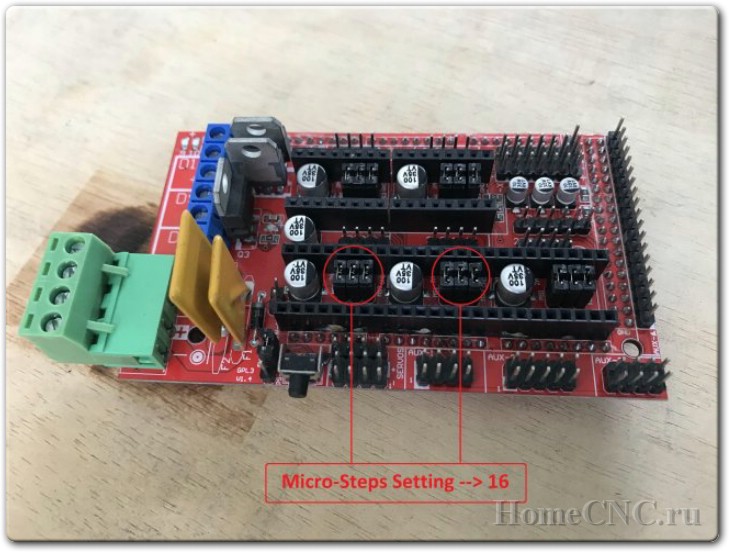
— Настройка микрошагов A4988: 1/16. (Драйвер A4988 позволяет увеличить это значение за счет возможности управления промежуточными шагами и имеет пять режимов микрошага (1(полный), 1/2, 1/4, 1/8 и 1/16).)
— В плоттере использовался ремень ГРМ GT2 с шагом 2 мм на зуб и шкивы GT2-80 с 80 зубьями. Значение 80×2 = 160 мм Шаг шкива означает длину окружности шкивов (диаметр шкива = 160 / PI = 50,9 мм) или расстояние перемещения зубчатых ремней, когда шаговые двигатели совершают 1 оборот.
-Настройка контактов Arduino Mega 2560: «board_ramps.h »
Обратите внимание, что RAMPS 1.4 имеет четыре штекерных разъема сервопривода, привязанных к контактам D11, D6, D5 и D4. В данном устройстве использовался штифт D11 для управления сервоприводом подъема ручки.
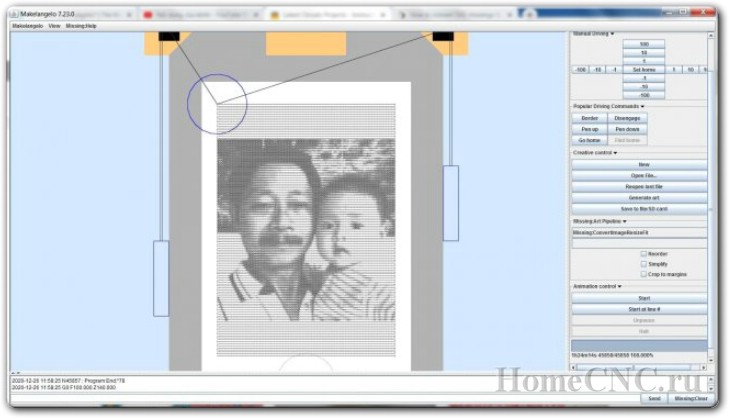
Программное обеспечение
Программное обеспечение Makelangelo — это компьютерный инструмент, содержащий все необходимое для настройки и экспорта файлов печати для вертикального плоттера. Он позволяет настраивать конфигурацию плоттера, размер бумаги, настройку сервопривода подъема пера. Кроме того, он также имеет встроенные инструменты для преобразования изображений в GCODE и отправки их контроллеру плоттера.
О том, как использовать программное обеспечение Makelangego, можно узнать здесь .
Откройте программное обеспечение Makelangelo и подключитесь к Arduino Mega 2560.
Дальше нужно проверить направление движения валов шаговых двигателей и расстояние перемещения.
Из раскрывающегося списка нужно выбрать «Manual Driving» и понажимать кнопки влево, вправо, вверх, вниз, с дополнительными расстояниями перемещения 1, 10, 100 мм.
Нажмите кнопки Pen up/ Pen down, чтобы проверить работу сервопривода.
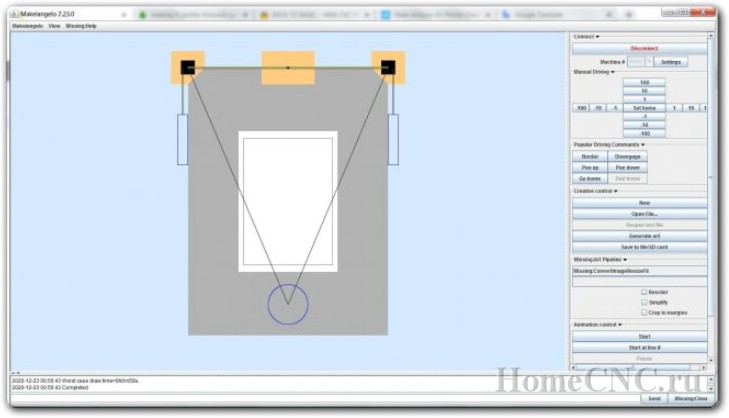
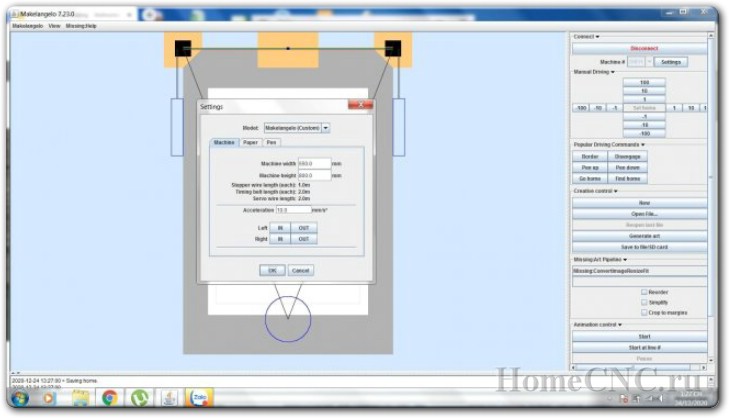
Дальше нужно открыть вкладку «Setting» и установить ряд настроек.
— Model: Makelangelo (Custom).
— Machine Width: 550 (mm).
— Machine Height: 800 (mm).
— Acceleration: 10 (mm/s).
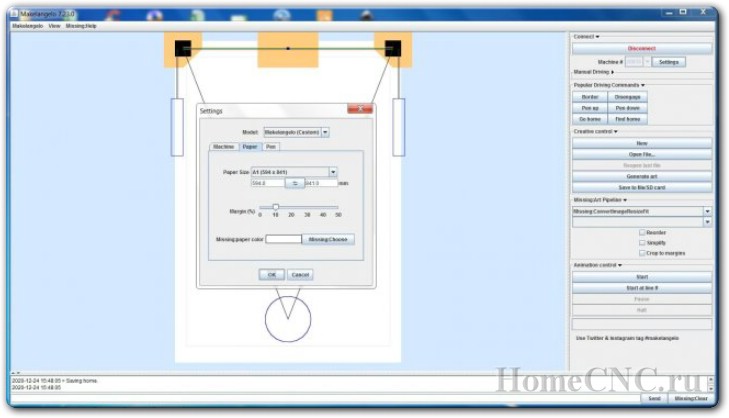
Устанавливаем размер бумаги и поля.
Настраивем перо и скорость рисования. Подъем ручки вверх / вниз можно откалибровать, регулируя значения угла сервопривода, скорость подъема и кнопки » Test «.
Дальше нужно нажать на «Generate art», выбрать график и настроить дополнительные параметры по усмотрению.
Затем нужно нажать «Open File», чтобы выбрать изображения. Программное обеспечение Makelangelo может конвертировать изображения JPG, PNG, BMP, GIF или DXF / SVG в GCODE в нескольких стилях формата преобразования.
Тестирование
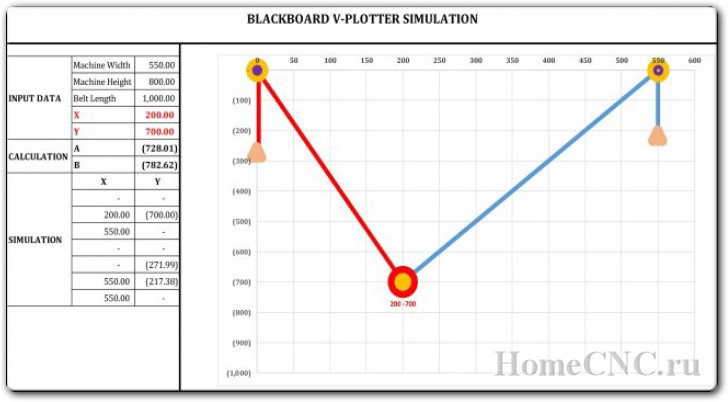
Скачиваем https://content.instructables.com/ORIG/FAH/W2EW/KJ2UV8P2/FAHW2EWKJ2UV8P2.xls для имитации вертикального плоттера.

Нужно ввести координаты X, Y, и шаблон Excel будет моделировать положение пера, а также длину ремня от шкивов до пера и от шкивов до противовесов.
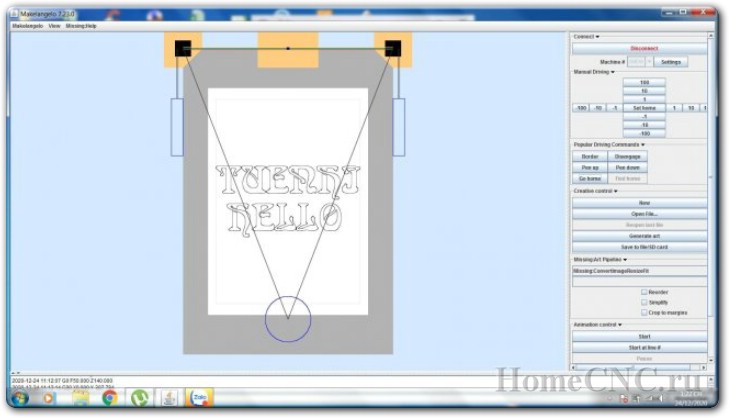
Чтобы провести первый тест, используем встроенную функцию «Generate art», далее «Your message here». В раскрывающемся списке, выбираем размер и шрифт, набираем сообщение (надпись) и нажимаем «Start».

Тест фигуры «Lissajous» из вкладки «Generate art».
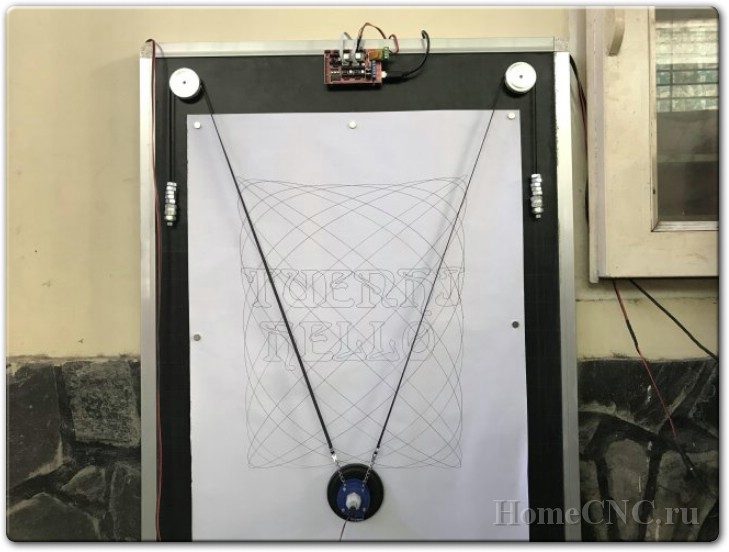
Тест фигуры «Spirograph».
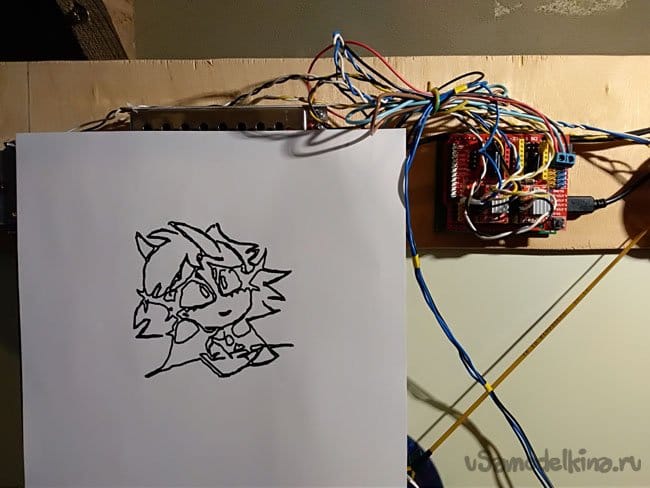
Рисунок после раскрашивания вручную.

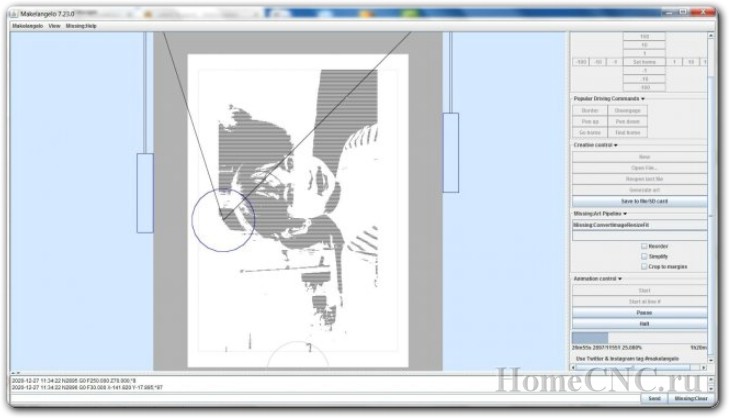
Дальше пробуем нарисовать портрет.

Для работы с фото нужно экспортировать изображение в формате DXF / SVG из Inkscape с расширениями штриховки, затем открыть этот файл DXF / SVG в Makelangelo, просто нажав «Пуск» для выполнения.
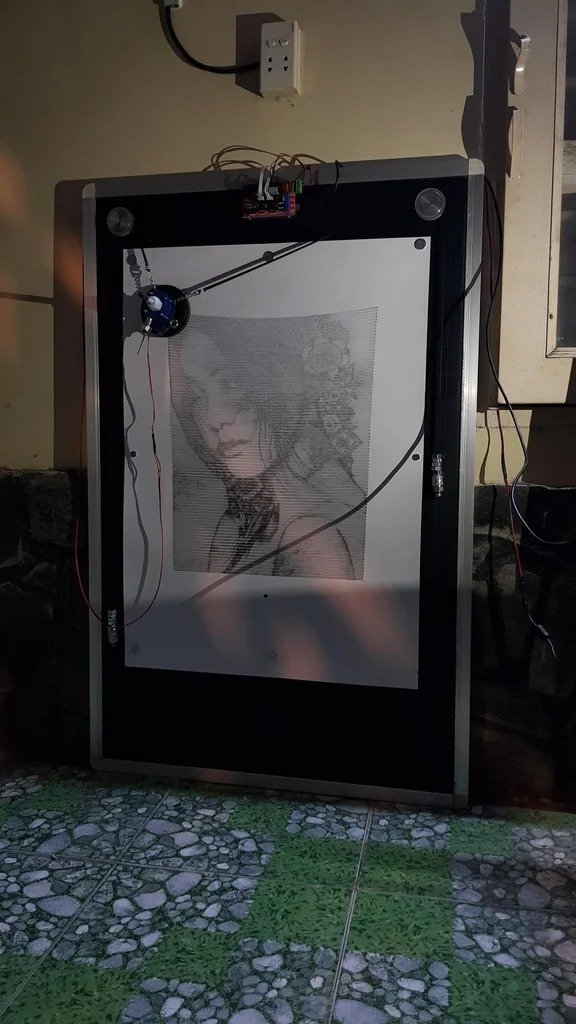

Некоторые моменты сборки плоттера, а также демонстрацию его работы можно посмотреть на видео.
Источник
Arduino вертикальный плоттер
И снова я со своими игрушками. Сегодня мы будем делать вертикальный плоттер. Преимуществ у него достаточно. Во-первых, легкая и мобильная конструкция. Используя присоски его можно закрепить на стекле (например, окно дома или витрина магазина) и рисовать маркером. Также можно закрепить на доске для рисования маркером (в школе или институте) и рисовать специальным маркером. А можно закрепить на любом полотне (фанерка, пластик или подобное) и рисовать на бумаге. Во-вторых, большая рабочая площадь при малом весе и размере конструкции. Используя ремешки от старых принтеров длиной около 60 см, можно рисовать на листе бумаге формата А3. В-третьих, универсальность используемого инструмента, можно закрепить маркер практически любой толщины. Ну в-четвертых, доступность компонентов для изготовления плоттера.
— Arduino Uno
— CNC Shield v3
— Драйвер шагового двигателя A4988 – 2шт.
— Шаговый двигатель (типа Nema 17)
— Зубатый шкив – 2шт
— Зубчатый ремешок (длиной не менее 600 мм) – 2шт
— Блок питания на 12 В, 3А
— Стабилизатор напряжения на 5 В
— Сервопривод SG-90
— Фанера толщиной 3 мм (подойдет и фанера до 6 мм)
— Ненужный DVD или CD диск
— Соединительные повода
— Паяльник, припой, канифоль и прочее
— Болтики с потайной головкой 3 х 60 мм, шайбы и гайки к ним
— Сверла по металлу 2,8; 3; 4 мм
— Метчики резьбы на 3 и 5
— Дрель

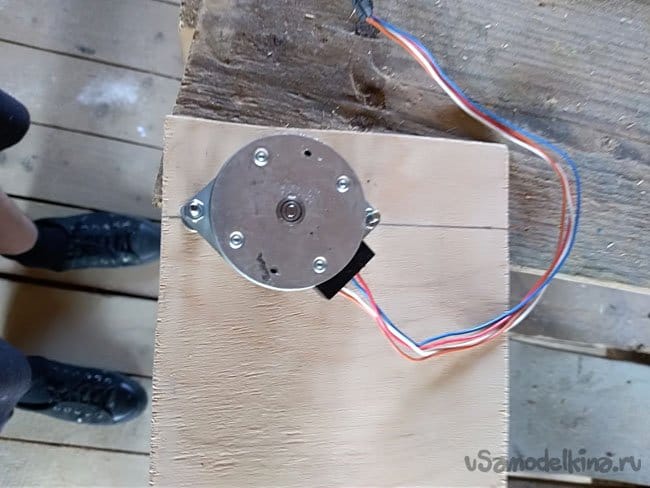
Шаговые двигатели можно практически любые. Я, например, возьму их из старого принтера.

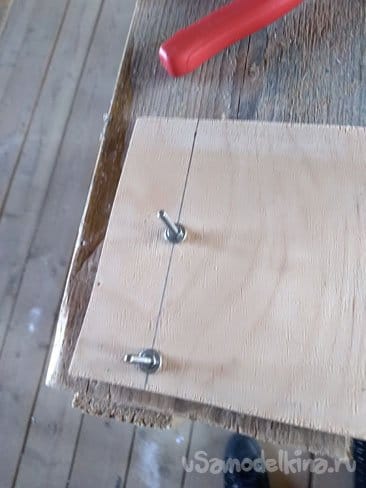
По краям фанерки проделываем отверстия для крепления шаговых двигателей. Отступаем от краев примерно 30 мм. В моем случае это два отверстия с расстоянием между ними 50 мм. В проделанных отверстия не забудьте снять фаску, с обратной стороны. Важно чтобы крепежные болтики не выступали:

Вставляем в отверстия болтики длиной 60 мм:
Зубчатый шкив надо подбирать под диаметр выходного вала шагового двигателя обычно, это 3 мм, а ремешок соответственно под шкив. Короче, главное, чтобы шкив сел на вал плотно, а ремешок при движении по шкиву не перескакивал через зубья. Надеваем шкив на двигатель:
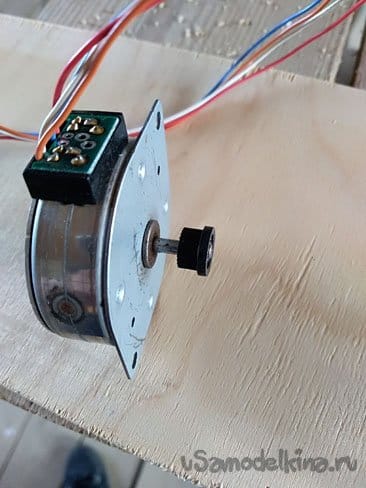
Со вторым двигателем поступаем также. Я все части брал от старых принтеров. Поэтому, они все подходили. При покупке новых, внимательно смотрите на параметры, чтобы они совпадали. Крепим двигатель с надетым шкивом к фанерке. Шкив должен вращаться свободно, между ним и фанеркой должно быть 2 – 3 мм:

Сверху выглядит так:
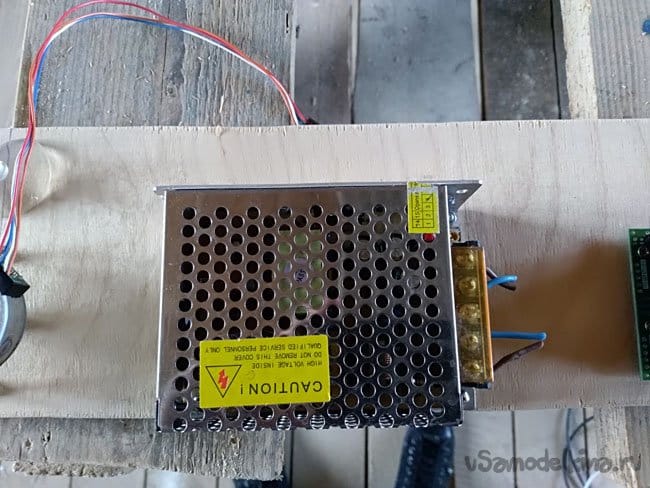
Между двигателей, ближе к левой стороне (отступив примерно 20—40 мм от двигателя), к фанерке прикручиваем блок питания:
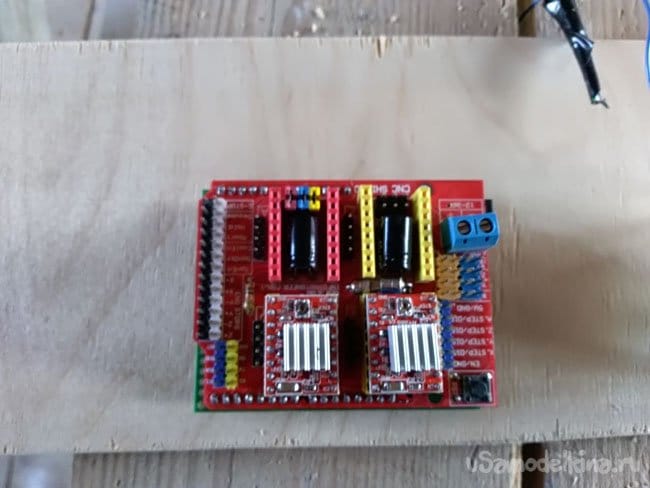
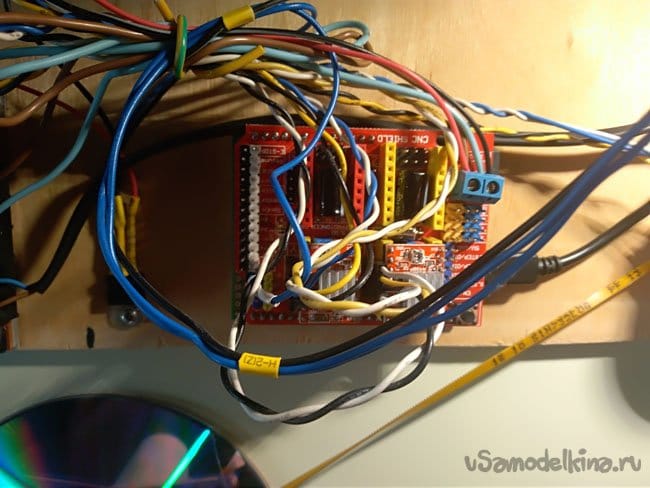
Правее блока питания, ближе к правому двигателю, крепит Arduino Uno:

На Arduino ставим CNC Shield v3. В CNC Shield вставляем два драйвера, на ось X и ось Y. Лучше сразу прикрепить радиаторы охлаждения на драйверы:
Шаг 2 Собираем все вместе.
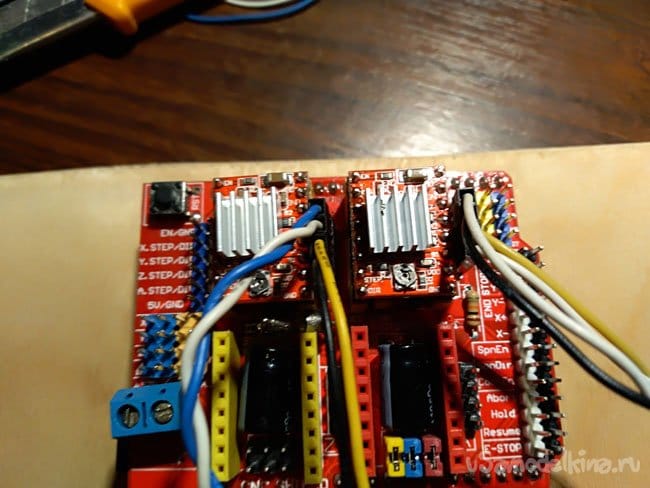
Итак, возьмем в руки паяльник. Припаиваем провода к шаговым двигателям, на другом конце клепаем разъем для подключения к CNC Shield и вставляем в разъемы рядом с осью X для левого двигателя и осью Y для правого двигателя:
Для питания двигателей нам нужно 12В, а питания сервопривода SG-90 не более 7. Поэтому для питания SG-90 берем стабилизатор на 5В (например, 7805), припаиваем к нему провода:

Крепим на фанерке:

С блоком питания все просто. Подаем на него 220В, получаем 12В. Выходы от блока питания подключаем к CNC Shield. И не забываем подать 12В на вход стабилизатора:

Сервопривод будет ездить на карате, вместе с маркером. Поэтому сделайте связку из 3 провод длиной примерно 50 см. Один будет идти от выхода стабилизатора напряжения, второй от минусу выхода блока питания, а третий (сигнальный) должен быть подключен к контакту Z+. В итоге должно получиться что-то подобное.
Шаг 3 Изготовление кареты.
Если есть доступ к 3D принтеру, проще всего и лучше, напечатать карету на нем. Именно от кареты , в основном, зависит качество рисования нашего плоттер. У меня такого принтера нет, поэтому изготовим карету из подручных материалов. Для начала берем отрезок полипропиленовой трубы диаметром 25 мм.

Отрезаем от трубы 80 мм. В середине делаем отверстие 4 мм. И нарезаем резьбу метчиком на 5 мм:

В проделанное отвесите с резьбой вкручиваем болт 5 х 20 мм. Он нужен для фиксации пишущего инструмента:

Теперь из тонкого пластика необходимо изготовить две такие детали:

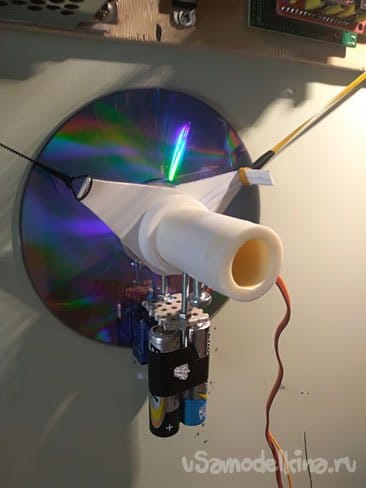
Диаметр отверстия этих деталей 25 мм. Края необходимо отогнуть на 90 градусов. Продеваем нашу заранее подготовленную трубку в эти детали. По сторонам от этих деталей надеваем стопорные кольца. Внизу трубки необходимо проделать два отверстия диаметром 2,8 мм, нарезать в них резьбу метчиком на 3 мм. Вкрутив в проделанные отверстия болтики диной 30 мм, крепим на их концах небольшую пластинку, сделанную из пластика или тонкого металла. И к этой пластине приклеиваем сервопривод. Карета получилась легкая, поэтому для натяжения ремней необходимо добавить небольшой груз. Я прикрутил две использованные батарейки типа АА. Этого было достаточно. В итоге должно получиться что-то подобное:



Осталось приклеить DVD или CD диск к трубке, так чтобы отверстие диска совпадало с отверстие в трубке, а рычаг сервопривода выступал за диск, а при повороте рычага, он должен подымать карету.
Шаг 4 Вешаем карету на место.
Карета должна висеть у нас на двух ремешках. На концах ремешков делаем петельки:

На одном конце ремешков будет висеть карета. Чтобы уравновесить карету на другой конец ремешков необходимо повесить небольшой груз. Я опять взял две батарейки типа АА. Приматываем к ним скрепку, и получается отличный грузик:

Один конец ремешка надеваем на карету, на один из рычагов. Продеваем свободный конец с петелькой через двигатель, и накидываем на шкив. Перекинув ремешок, подвешиваем грузик на свободную петельку ремешка.


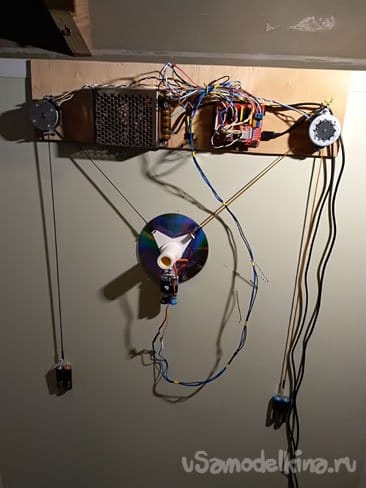
То же самое проделываем и со вторым ремешком. Таким образом мы подвешиваем карету на ремешках. А грузики нужны чтобы натягивать ремешки. Без натяжения ремешки будут проскальзывать при движении двигателей. В собранном виде плоттер выглядит так:
Теперь установим карету в начальное положение. Замерив расстояние между двигателей делим его пополам, и находим тем самым середину между ними. Отметим маркером на фанерке, чтобы каждый раз не мерить его. Отступаем 100 мм вниз, это и есть наша искомая начальная позиция кареты. Перед началом работы необходимо вручную устанавливать карету в эту позицию.
Как я уже говорил, маркер можно использовать практически любой, главное, чтобы его можно было продеть через трубку. Для тестов возьмем толстый маркер.

Шаг 5 Подготовка скетча и программы управления.
Для работы плоттера и управления им мы будет использовать труды одного из гуру разработчиков Sandy Noble. Заходим на его страничку на Github.
Нам нужно скачать polargraph_server_a1 – это скетч для Arduino. Скетч универсальный. Его можно настроить для работы с разными драйверами и для разных плат. Чтобы не вдаваться в тонкости настройки, можете скачать скетч, с правильными настройками для нашего плоттера:
Для управления плоттером с того же сайта скачиваем «polargraphcontroller».
Программа написана на processing. Для ее работы нужно скачать processing-2.2.1. Именно эту версию, так как в более свежих версия будут возникать ошибки компиляции. Скачиваем с сайта
Для заливки скетча нам понадобиться Arduino IDE. Скачиваем с официального сайта проекта
Заливаем скетч в Arduino. В программе управления много настроек. Подробное описание по работе с этой программой можно посмотреть на видео:
Источник