- Как это делается: универсальный мягкий захват для робоманипулятора
- Роботизированная рука: захватные устройства
- Что такое роботизированная рука
- Содержание
- Захватные устройства для роботизированных рук
- Настольная робо-рука манипулятор из оргстекла на сервоприводах своими руками или реверс-инжиниринг uArm
- Пробы и ошибки
- Особенности манипулятора
- Механика
- Электроника
- Программирование
- Видео работы
- Захват для манипулятора своими руками
- Захваты для кирпича в поддонах
- Захват-манипулятор для самодельного робота Arduino.
- Дубликаты не найдены
- Arduino & Pi
- Правила сообщества
- Фристайло
- Осваиваю ROS(Robot Operating System) и делаю 2wd платформу
- Настольная робо-рука манипулятор из оргстекла на сервоприводах своими руками или реверс-инжиниринг uArm
- Пробы и ошибки
- Особенности манипулятора
- Механика
- Электроника
- Программирование
- Видео работы
Как это делается: универсальный мягкий захват для робоманипулятора
Мягкие захваты — одно из важнейших направлений развития современной профессиональной робототехники. Почему это так?

Мягкие захваты — одно из важнейших направлений развития современной профессиональной робототехники. Ключевой тренд в данной области — уход от сложного программирования и использования массы сенсоров, регулирующих движение и нажим каждого отдельного “пальца” “роборуки” и переход к простым альтернативам.
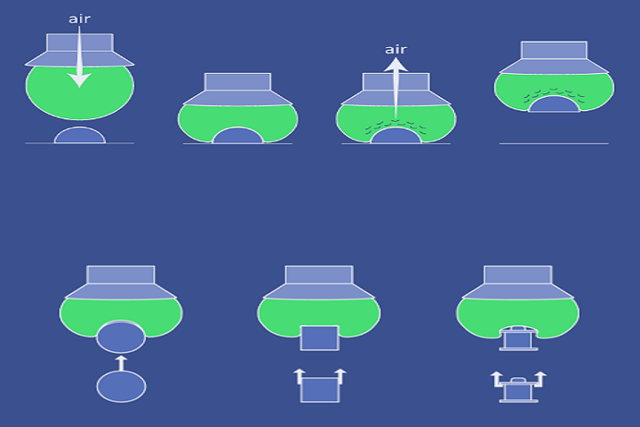
Почему это важно? Наличие мягких захватов позволит машинам работать с деликатными грузами, что приобретает особую актуальность в процессе сбора урожая или обработки пищевых товаров на складе. Концепт строится вокруг простого принципа: чем сильнее мы сжимаем некоторые сыпучие материалы (например, молотый кофе), тем прочнее и жестче сцепляются их элементы.
Устроен базовый захват просто: внешняя система регулирует давление воздуха в воздушном шаре, наполненным молотым кофе. В “расслабленном” состоянии объем шарика увеличивается, а кофе становится мягким и податливым, позволяя “манипулятору” легко облегать и “хватать” предметы. Прикасаясь к объектам, устройство “утапливает” их в себе, облегает, а затем откачивает из шарика лишний воздух и “твердеет”.
Пользователь Makezine Jason Poel Smith разместил на сайте набор инструкций по созданию механической составляющей манипулятора (ни о насосе, ни о готовом роботе в инструкции не говорится).
Казалось бы — что может быть проще заполненного молотым кофе воздушного шарика? Технология, разработанная в 2010 году специалистами из Корнуэльского и Чикагского университетов, легла в основу коммерческого захвата Versaball.
Вот только попытки коммерциализации устройства не увенчались успехом.
Технология отражает философский подход к развитию модулей для роботов, отвечающих базовым представлениям о децентрализации. Делая шаг, мы не задумываемся о том, под каким углом следует поставить ногу или с какой силой стоит напрягать те или иные мышцы. Часть процессов протекают в “автономном” режиме, тогда как другая часть попросту вытекает из свойств “материалов”. Так, например, мягкая стопа облегает камни и неровности рельефа. Почему робот должен затрачивать ресурсы процессора на то, чего можно достичь гораздо более простыми и экономичными методами? Жаль, что хорошая идея пока что так и не стала востребованной.
За новостями робототехники, ИИ, а также за трендами удобно следить в телеграм-канале prorobots
Источник
Роботизированная рука: захватные устройства

Что такое роботизированная рука
Самым распространенный производственный робот — манипулятор или «роботизированная рука». Рука робота состоит из нескольких сегментов, соединенных снабженными шаговыми двигателями или сервоприводами суставами, которые управляются компьютером.
На рабочей части руки расположен эффектор — непосредственно взаимодействующее с объектами устройство. Чаще всего, эффектор — одно из множества возможных захватных устройств, либо инструмент для обработки объектов. О захватах роботов, их разновидностях и применении читайте в этой статье.
Содержание
Захватные устройства для роботизированных рук

Эффектор робота — это физический интерфейс между рукой робота и обрабатываемой деталью. Этот инструмент на конце руки (EOAT: End of Arm Tooling) является одной из наиболее важных частей робота.
Захват — разновидность эффектора, предназначенная для удержания и перемещения деталей. Захват входит в прямой контакт с продуктом, поэтому важно выбрать правильный тип захвата, наиболее подходящий для целевых объектов, который сможет надежно удерживать и не повредить их.

Источник: top3dexpo.ru, демонстрация работы робота Hanwha на выставке Top 3D Expo.
Роботизированные руки часто имеют встроенные сенсоры, которые сообщают компьютеру, насколько сильно робот захватывает определенный объект. Это не даёт роботу уронить или сломать обрабатываемую деталь.

Другие существующие виды эффекторов: сварочное, фрезерное или сверлильное оборудование, шуруповерты и гайковерты, распылители для краски или специальные захваты для определенных типов объектов, 3D-печатные экструдеры, строительный инструмент.
Существую также антропоморфные захваты, повторяющие кисть человеческой руки, но они почти не применяются в промышленности (до тех пор, пока антропоморфные роботы не задействованы на производстве), а предназначены для исследовательских и медицинских целей, например — как часть протезов.
Сегодня разработчики придерживаются двух принципиально разных подходов к проектированию эффекторов: универсальные захваты под любой тип инструмента или задачи, либо быстросменные узкоспециализированные захваты. Каждый подход имеет как свои достоинства, так и недостатки, поэтому проектировщикам роботизированных производств приходится учитывать экономическую целесообразность обоих подходов. На сегодняшний день наиболее распространенными являются узкоспециализированные захваты.
Источник
Настольная робо-рука манипулятор из оргстекла на сервоприводах своими руками или реверс-инжиниринг uArm
Хочу поделиться с вами результатами реверс-инжиниринга uArm – простого настольно манипулятора из оргстекла на сервоприводах.
Проект uArm от uFactory собрал средства на кикстартере уже больше двух лет назад. Они с самого начала говорили, что это будет открытый проект, но сразу после окончания компании они не торопились выкладывать исходники. Я хотел просто порезать оргстекло по их чертежам и все, но так как исходников не было и в обозримом будущем не предвиделось, то я принялся повторять конструкцию по фотографиям.
Сейчас моя робо-рука выглядит так:

Работая не спеша за два года я успел сделать четыре версии и получил достаточно много опыта. Описание, историю проекта и все файлы проекта вы сможете найти под катом.
Пробы и ошибки
Начиная работать над чертежами, я хотел не просто повторить uArm, а улучшить его. Мне казалось, что в моих условиях вполне можно обойтись без подшипников. Так же мне не нравилось то, что электроника вращается вместе со всем манипулятором и хотелось упростить конструкцию нижней части шарнира. Плюс я начал рисовать его сразу немного меньше.
С такими входными параметрами я нарисовал первую версию. К сожалению, у меня не сохранилось фотографий той версии манипулятора (который был выполнен в желтом цвете). Ошибки в ней были просто эпичнейшие. Во-первых, ее было почти невозможно собрать. Как правило, механика которую я рисовал до манипулятора, была достаточно простая, и мне не приходилось задумываться о процессе сборки. Но все-таки я его собрал и попробовал запустить, И рука почти не двигалась! Все детли крутились вокруг винтов и, сли я затягивал их так, чтобы было меньше люфтов, она не могла двигаться. Если ослаблял так, чтобы она могла двигаться, появлялись невероятные люфты. В итоге концепт не прожил и трех дней. И приступил к работе над второй версией манипулятора.
Красный был уже вполне пригоден к работе. Он нормально собирался и со смазкой мог двигаться. На нем я смог протестировать софт, но все-таки отсутствие подшипников и большие потери на разных тягах делали его очень слабым.
Затем я забросил работу над проектом на какое-то время, но вскоре принял решении довести его до ума. Я решил использовать более мощные и популярные сервоприводы, увеличить размер и добавить подшипники. Причем я решил, что не буду пытаться сделать сразу все идеально. Я набросал чертежи на скорую руки, не вычерчивая красивых сопряжений и заказал резку из прозрачного оргстекла. На получившемся манипуляторе я смог отладить процесс сборки, выявил места, нуждающиеся в дополнительном укреплении, и научился использовать подшипники.
После того, как я вдоволь наигрался с прозрачным манипулятором, я засел за чертежи финальной белой версии. Итак, сейчас вся механика полностью отлажена, устраивает меня и готов заявить, что больше ничего не хочу менять в этой конструкции:
Меня удручает то, что я не смог привнести ничего принципиально нового в проект uArm. К тому времени, как я начал рисовать финальную версию, они уже выкатили 3D-модели на GrabCad. В итоге я только немного упростил клешню, подготовил файлы в удобном формате и применил очень простые и стандартные комплектующие.
Особенности манипулятора
Механика
Для сборки необходимо вырезать детали из оргстекла толщиной 5мм:
С меня за резку всех этих деталей взяли около $10.
Основание монтируется на большом подшипнике:
Особенно трудно было продумать основание с точки зрения процесса сборки, но я подглядывал за инженерами из uArm. Качалки сидят на штифте диаметром 6мм. Надо отметить, что тяга локтя у меня держится на П-образном держателе, а у uFactory на Г-образном. Трудно объяснить в чем разница, но я считаю у меня получилось лучше.
Захват собирается отдельно. Он может поворачиваться вокруг своей оси. Сама клешня сидит прямо на валу двигателя:
В конце статьи я дам ссылку на суперподробную инструкцию по сборке в фотографиях. За пару часов можно уверенно все это скрутить, если все необходимое есть под рукой. Также я подготовил 3D-модель в бесплатной программе SketchUp. Её можно скачать, покрутить и посмотреть что и как собрано.
Электроника
Чтобы заставить руку работать достаточно всего навсего подключить пять сервоприводов к Arduino и подать на них питание с хорошего источника. У uArm использованы какие-то двигатели с обратной связью. Я поставил три обычных двигателя MG995 и два маленьких двигателя с металлическим редуктором для управления захватом.
Тут мое повествование тесно сплетается с предыдущими проектами. С некоторых пор я начал преподавать программирование Arduino и для этих целей даже подготовил свою Arduino-совместимую плату. С другой стороны как-то раз мне подвернулась возможность дешево изготовить платы (о чем я тоже писал). В итоге все это закончилось тем, что я использовал для управления манипулятором свою собственную Arduino-совместимую плату и специализированный шилд.
Этот шилд на самом деле очень простой. На нем четыре переменных резистора, две кнопки, пять разъемов для сервопривода и разъем питания. Это очень удобно с точки зрения отладки. Можно загрузить тестовый скетч и записать какой-нибудь макрос для управления или что-нибудь вроде того. Ссылку для скачивания файла платы я тоже дам в конце статьи, но она подготовлена для изготовления с металлизацией отверстий, так что мало пригодна для домашнего производства.
Программирование
Самое интересное, это управление манипулятором с компьютера. У uArm есть удобное приложение для управления манипулятором и протокол для работы с ним. Компьютер отправляет в COM-порт 11 байт. Первый из них всегда 0xFF, второй 0xAA и некоторые из оставшихся — сигналы для сервоприводов. Далее эти данные нормализуются и отдаются на отработку двигателям. У меня сервоприводы подключены к цифровым входам/выходам 9-12, но это легко можно поменять.
Терминальная программа от uArm позволяет изменять пять параметров при управлении мышью. При движении мыши по поверхности изменяется положение манипулятора в плоскости XY. Вращение колесика — изменение высоты. ЛКМ/ПКМ — сжать/разжать клешню. ПКМ + колесико — поворот захвата. На самом деле очень удобно. При желании можно написать любой терминальный софт, который будет общаться с манипулятором по такому же протоколу.
Я не буду здесь приводить скетчи — скачать их можно будет в конце статьи.
Видео работы
И, наконец, само видео работы манипулятора. На нем показано управление мышью, резисторами и по заранее записанной программе.
Источник
Захват для манипулятора своими руками
Захваты для кирпича в поддонах
Опции темы
Поиск по теме
я тоже хочу уже давно себе такие. со стропами возни много.
хорошо если помогают разгружаться. а если нет? сам подцепи поправь натяни и т.д. а с такой приблудой красота работать. быстрее налаживайте производство ))))

эту хрень сам не вставиш под поддон только вдвоём. т.к надо стрелу подводить а джамшут должен вставлять её.
Ещё вот фотки трапов,кто не помню в какой ветке спрашивал.Может кому пригодятся.
Когда машину затянул, то куда сходни деваешь? Если вдоль бортов, то привязывать нужно, иначе по машинке стучать могут. И как туда их затягиваешь, если краном, то долго и геморно, если руками, то в снег и грязь танцы с бубном ещё те. Клиент обычно в помощники не рвется, а как правильно сказал Андрей 098, Джамшута с собой возить не с руки.
У нас у Мужичка одного, двойной такой захват есть(500-ка стрела), но он занимается продажей кирпича и время это его деньги. а когда почасовой возит то он её на базе оставляет.
А у нас на всех базах и заводах, кирпич загружают вилочными погрузчиками, быстрее.
Видать везде по разному. Лично у нас нигде не видел такого кроме как на погрузке пеноблока и то на самом авторитетном заводе. А на всех кирзаводах тока цепи и разная их длинна даж на облицовке.
Вот сегодня опять подвернулся калым.Фотик сразу в карман.Разгружал Камаз длиномер с керамическими кирпичами.Почти полтора часа,и взял 2000руб.Водила стоял в кузове(цеплял),а хозяин принимал на земле,какие ещё Джамшуты вам нужны.Очень удобно и ни чего не вываливается.Вот фотики.
Это хорошо когда все паддоны в ряд стоят. А если в полуприцепе камаза их 18 штук то тогда как цеплять захватом. Да и не у всех камазистов борта открываются.
Это и есть Камаз полуприцеп,открывали только задний борт.В один ряд три поддона в плотную и в длину 11 рядов,тоже плотно(на фотке видно),получается 33 поддона.Водила захваты одевал сзади.А чтоб цеплять тросами,это же каждую пачку двигать надо.
Привет!Эльверт Ты тока все таки 14 мм пластину привари вместо прутков
всем привет!я всё-таки ЗА различные захваты!молодец Эльверт,а в углу ещё и зацепы для эвакуации лежат?тоже сам варил?я сам использую кирпичный захват,только для тр. плитки.да,он громоздский и тяжёлыё(мой,наверно,тонны 2 выдержит-перестраховался блин!)и не всегда его подсунешь под поддон(каких они видов только не бывают!)но зато у него нет,так сказать,контакта с грузом.когда надо поднять ту-же плитку и не собрать её в кучу,потому-что поддон прогнулся под 18-ю кв.(меньше 15-и вообще не кладут у нас).очень часто груз(плитка,кирпич)сложен так,что не доходит до края поддона.тут уже ломается поддон(при поднятии любыми стропами),а он обычно возвратный.и ещё немаловажное приемущество захвата-попробуйте разгрузить ту-же фуру с кирпичём,как у Эльверта,обычными тросами, лентами. жизнь наша слишком коротка. они-же вплотную загружены(так больше помещяется и в дороге не болтается).а почасовой я работаю только когда держу барабан с кабелем и двигатель заглушен:)) и себе так-же гружу-впритык(10 е\п). а если место для строповки оставлять,тогда-8 е\п. спасибо,что выслушли и извиняйте,если,чего не так.
Согласен.Удобная вещь и быстро.Тоже хочу сделать себе.Там в камазе кирпич Белебеевский?Размеры бы написал ещё этих рогов.
Захват-манипулятор для самодельного робота Arduino.
На втором видео скетч залит в контроллер робота, который таким образом он работает автономно. В данном случае манипулятор установлен на серийном заводском роботе для детского творчества ScratchDuino.Робоплатформа, который «собирает мусор из разных углов».
Дубликаты не найдены
Arduino & Pi
941 пост 17K подписчиков
Правила сообщества
В нашем сообществе запрещается:
• Добавлять посты не относящиеся к тематике сообщества, либо не несущие какой-либо полезной нагрузки (флуд)
• Задавать очевидные вопросы в виде постов, не воспользовавшись перед этим поиском
• Рассуждать на темы политики
а как робот видит банку? или в коде позиция фиксированная?
Там есть ссылка ( https://edugalaxy.intel.ru/index.php?automodule=blog&blo. ) на описание изготовления манипулятора. Робот видит банку при помощи датчика. Излучатель и приемник, установленные на «лапах», взяты от датчика TSRT5000. Увидев банку, останавливается, берет банку и едет по своим делам))).
А как он определяет какую банку брать первой? А если две банки поставить рядом?
Или он видит только банку которая попалась ему в захват?
Если две банки поставить рядом, то он ничего не захватит, он ведь движется по черной полосе и ни одна из банок не попадет в зону действия захвата. В первом видео банки стоят подряд и он берет их по очереди, когда банка попадает в зону действия захвата и срабатывает установленный на захвате датчик. Во втором видео заложено в программе на перекрестке первый раз поворачивать направо, второй раз проезжать прямо, а в третий раз ехать налево.
перекресток обнаруживается одним датчиком?
Фристайло
Осваиваю ROS(Robot Operating System) и делаю 2wd платформу
Всем привет. Желание конструировать у меня не пропадает с самого детства. Новые игрушки на глазах родителей разбирались моментально и собиралась какая-то неведомая дичь. Первая батарейка и горящая лампочка от неё, первое короткое замыкание, паяльник, канифоль и прочее прочее постепенно добавлялось с возрастом и мозгами. Первый класс, первый компьютер, не понимая тогда вообще ни чего в нем удалял разные dll файлы считая себя хакером и получая годных люлей когда слетал windows. Первое Hello World на Паскаль, эх, как давно это все было. Но энтузиазм не угасает по сей день. Первая попытка сделать, что-то удаленно управляемое была в 2015 году, эта была обычная машинка с веб-камерой и raspberry pi на борту, управление происходило через браузер с помощью скрипта на python + flask.
На данный момент скилл в программировании, электроники подкачался и бывают разные попытки, сделать что-то интересное, пусть даже и бесполезное(как тут https://pikabu.ru/story/popyitka_postroit_i_nauchit_deltarobota_igrat_na_sintezatore_7642204 ), для меня главное опыт.
И сейчас я решил добавить в свою копилку знаний разработку автономных платформ с использованием ROS. А почему бы и нет?
Первым делом, заказал два моторчика от стеклоподъемников, которые приводят платформу в движение и энкодеры которые с помощью PID регулятора поддерживают заданную скорость вращения, Arduino nano, banana pi m3 вместо raspberry pi 4 и китайский лидар. Когда это добро пришло, смоделировал платформу и вырезал на ЧПУ, так же смоделировал крепления энкодеров к моторчику стеклоподъемников, подключил все это дело к Arduino nano, залил прошивку, установил пакет ros на banana pi которая в дальнейшем встанет на платформу.
Настольная робо-рука манипулятор из оргстекла на сервоприводах своими руками или реверс-инжиниринг uArm
Хочу поделиться с вами результатами реверс-инжиниринга uArm – простого настольно манипулятора из оргстекла на сервоприводах.
Проект uArm от uFactory собрал средства на кикстартере уже больше двух лет назад. Они с самого начала говорили, что это будет открытый проект, но сразу после окончания компании они не торопились выкладывать исходники. Я хотел просто порезать оргстекло по их чертежам и все, но так как исходников не было и в обозримом будущем не предвиделось, то я принялся повторять конструкцию по фотографиям.
Сейчас моя робо-рука выглядит так:
Работая не спеша за два года я успел сделать четыре версии и получил достаточно много опыта. Описание, историю проекта и все файлы проекта вы сможете найти под катом.
Пробы и ошибки
Начиная работать над чертежами, я хотел не просто повторить uArm, а улучшить его. Мне казалось, что в моих условиях вполне можно обойтись без подшипников. Так же мне не нравилось то, что электроника вращается вместе со всем манипулятором и хотелось упростить конструкцию нижней части шарнира. Плюс я начал рисовать его сразу немного меньше.
С такими входными параметрами я нарисовал первую версию. К сожалению, у меня не сохранилось фотографий той версии манипулятора (который был выполнен в желтом цвете). Ошибки в ней были просто эпичнейшие. Во-первых, ее было почти невозможно собрать. Как правило, механика которую я рисовал до манипулятора, была достаточно простая, и мне не приходилось задумываться о процессе сборки. Но все-таки я его собрал и попробовал запустить, И рука почти не двигалась! Все детли крутились вокруг винтов и, сли я затягивал их так, чтобы было меньше люфтов, она не могла двигаться. Если ослаблял так, чтобы она могла двигаться, появлялись невероятные люфты. В итоге концепт не прожил и трех дней. И приступил к работе над второй версией манипулятора.
Красный был уже вполне пригоден к работе. Он нормально собирался и со смазкой мог двигаться. На нем я смог протестировать софт, но все-таки отсутствие подшипников и большие потери на разных тягах делали его очень слабым.
Затем я забросил работу над проектом на какое-то время, но вскоре принял решении довести его до ума. Я решил использовать более мощные и популярные сервоприводы, увеличить размер и добавить подшипники. Причем я решил, что не буду пытаться сделать сразу все идеально. Я набросал чертежи на скорую руки, не вычерчивая красивых сопряжений и заказал резку из прозрачного оргстекла. На получившемся манипуляторе я смог отладить процесс сборки, выявил места, нуждающиеся в дополнительном укреплении, и научился использовать подшипники.
После того, как я вдоволь наигрался с прозрачным манипулятором, я засел за чертежи финальной белой версии. Итак, сейчас вся механика полностью отлажена, устраивает меня и готов заявить, что больше ничего не хочу менять в этой конструкции:
Меня удручает то, что я не смог привнести ничего принципиально нового в проект uArm. К тому времени, как я начал рисовать финальную версию, они уже выкатили 3D-модели на GrabCad. В итоге я только немного упростил клешню, подготовил файлы в удобном формате и применил очень простые и стандартные комплектующие.
Особенности манипулятора
Механика
Для сборки необходимо вырезать детали из оргстекла толщиной 5мм:
Основание монтируется на большом подшипнике:
Особенно трудно было продумать основание с точки зрения процесса сборки, но я подглядывал за инженерами из uArm. Качалки сидят на штифте диаметром 6мм. Надо отметить, что тяга локтя у меня держится на П-образном держателе, а у uFactory на Г-образном. Трудно объяснить в чем разница, но я считаю у меня получилось лучше.
Захват собирается отдельно. Он может поворачиваться вокруг своей оси. Сама клешня сидит прямо на валу двигателя:
В конце статьи я дам ссылку на суперподробную инструкцию по сборке в фотографиях. За пару часов можно уверенно все это скрутить, если все необходимое есть под рукой. Также я подготовил 3D-модель в бесплатной программе SketchUp. Её можно скачать, покрутить и посмотреть что и как собрано.
Электроника
Чтобы заставить руку работать достаточно всего навсего подключить пять сервоприводов к Arduino и подать на них питание с хорошего источника. У uArm использованы какие-то двигатели с обратной связью. Я поставил три обычных двигателя MG995 и два маленьких двигателя с металлическим редуктором для управления захватом.
Тут мое повествование тесно сплетается с предыдущими проектами. С некоторых пор я начал преподавать программирование Arduino и для этих целей даже подготовил свою Arduino-совместимую плату. С другой стороны как-то раз мне подвернулась возможность дешево изготовить платы (о чем я тоже писал). В итоге все это закончилось тем, что я использовал для управления манипулятором свою собственную Arduino-совместимую плату и специализированный шилд.
Этот шилд на самом деле очень простой. На нем четыре переменных резистора, две кнопки, пять разъемов для сервопривода и разъем питания. Это очень удобно с точки зрения отладки. Можно загрузить тестовый скетч и записать какой-нибудь макрос для управления или что-нибудь вроде того. Ссылку для скачивания файла платы я тоже дам в конце статьи, но она подготовлена для изготовления с металлизацией отверстий, так что мало пригодна для домашнего производства.
Программирование
Самое интересное, это управление манипулятором с компьютера. У uArm есть удобное приложение для управления манипулятором и протокол для работы с ним. Компьютер отправляет в COM-порт 11 байт. Первый из них всегда 0xFF, второй 0xAA и некоторые из оставшихся — сигналы для сервоприводов. Далее эти данные нормализуются и отдаются на отработку двигателям. У меня сервоприводы подключены к цифровым входам/выходам 9-12, но это легко можно поменять.
Терминальная программа от uArm позволяет изменять пять параметров при управлении мышью. При движении мыши по поверхности изменяется положение манипулятора в плоскости XY. Вращение колесика — изменение высоты. ЛКМ/ПКМ — сжать/разжать клешню. ПКМ + колесико — поворот захвата. На самом деле очень удобно. При желании можно написать любой терминальный софт, который будет общаться с манипулятором по такому же протоколу.
Я не буду здесь приводить скетчи — скачать их можно будет в конце статьи.
Видео работы
И, наконец, само видео работы манипулятора. На нем показано управление мышью, резисторами и по заранее записанной программе.
Источник