- КАК СДЕЛАТЬ УСТРОЙСТВО ДЛЯ ЛЕВИТАЦИИ
- Разборка ультразвукового датчика
- Загрузка кода Arduino
- 2 Схемы
- Акустическая левитация — схема и испытания устройства
- Принципиальная схема
- Запуск и калибровка левитатора
- Аппарат ультразвуковой левитации под управлением Aрдуино
- Акустическая левитация своими руками
- Звуковые колебания
- Описание скетча Ардуино
КАК СДЕЛАТЬ УСТРОЙСТВО ДЛЯ ЛЕВИТАЦИИ
Если хотите поэкспериментировать с ультразвуковой левитацией — заставить объекты парить в воздухе используя энергию звуковых волн — не нужно никакого сложного оборудования или дорогих деталей. Подойдут Arduino, драйвер шагового двигателя и переделанный УЗ-датчик расстояния. Конечно такой ультразвуковой левитатор не будет поднимать тяжелые предметы. Но очень увлекательно наблюдать, как маленькие шарики из пенопласта парят как по волшебству.
В отличие от магнитной левитации ультразвуковой метод не требует контрольного контура для стабилизации зависшего объекта. Используя акустическую левитацию, объект просто помещается в один из узлов стоячей акустической волны. И можно сделать так, чтобы несколько предметов зависли друг над другом одновременно, равномерно расположенные по цепочке!
В общем этот проект, основанный на недорогом ультразвуковом датчике, безусловно самый простой из всех аналогичных конструкций.
Разборка ультразвукового датчика
Такие ультразвуковые излучатели используются в датчиках расстояния, например модуль HC-SR04, который можно купить на Али менее чем за 2 доллара.

Эти модули содержат один преобразователь работающий в качестве передатчика (T), и другой, выступающий в качестве приемника (R). В принципе, T-преобразователь является лучшим выбором для использования в качестве фактического передатчика, поэтому купили два датчика и сняли T-преобразователи с каждого из них. (В крайнем случае, вы можете купить только один датчик — преобразователь R также работает достаточно хорошо, как для первых экспериментов.

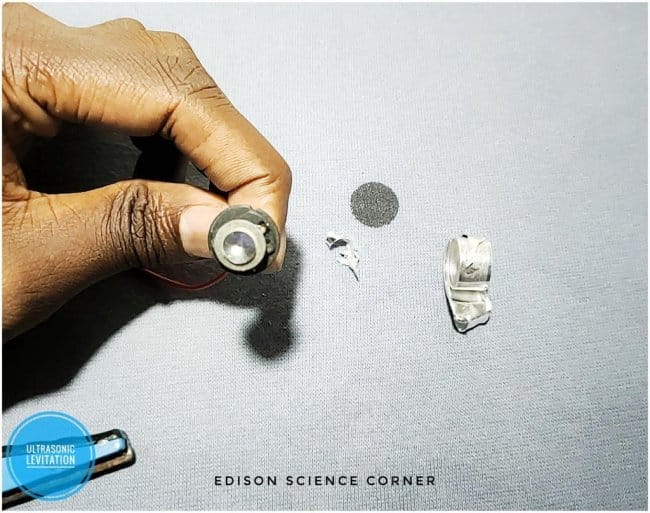
Разберите один из преобразователей. Не выбрасывайте маленькую сеточку — она окажется полезной в дальнейшем деле. Преобразователи предназначены для работы на частоте 40 кГц, на которой они работают наиболее эффективно. Этот сигнал и будет генерироваться модулем Arduino Nano.
Загрузка кода Arduino
Arduino код выполняет большую часть работы на этапе настройки. Во-первых, он устанавливает все аналоговые порты для вывода. Затем Timer1 настраивается для запуска прерывания сравнения с тактовой частотой 80 кГц. Каждое прерывание просто инвертирует состояние аналоговых портов. Это преобразует прямоугольный сигнал 80 кГц в двухполупериодный цикл 40 кГц.
byte TP = 0b10101010; // Каждый другой порт получает инвертированный сигнал
DDRC = 0b11111111; // Установить все аналоговые порты для вывода
noInterrupts(); // Отключаем прерывания
OCR1A = 200; // Установить регистр сравнения (16 МГц / 200 = прямоугольная волна 80 кГц -> полная волна 40 кГц)
TCCR1B |= (1 без прескалинга
Форум по обсуждению материала КАК СДЕЛАТЬ УСТРОЙСТВО ДЛЯ ЛЕВИТАЦИИ
 Принципиальная схема усилителя наушников с микросхемой MAX4410 и искажениями всего 0,003%.
Принципиальная схема усилителя наушников с микросхемой MAX4410 и искажениями всего 0,003%.
 Увеличение мощности интегральных усилителей транзисторами. Рассматривается на примере схем LM3886 и TDA7294.
Увеличение мощности интегральных усилителей транзисторами. Рассматривается на примере схем LM3886 и TDA7294.
 Изучение принципа действия и параметров кварцевого генератора, выбор КГ для различных устройств.
Изучение принципа действия и параметров кварцевого генератора, выбор КГ для различных устройств.
Источник
2 Схемы
Принципиальные электросхемы, подключение устройств и распиновка разъёмов

Акустическая левитация — схема и испытания устройства

Устройство для проведения опытов по акустической левитации состоит из следующих элементов:
- Импульсный блока питания компьютера ATX, в котором используем линию +12 V.
- Генератор с усилителем.
- Ультразвуковой мощный излучатель.
Принципиальная схема
Схема генератора основана на микросхеме CD4047. Частота сигнала зависит от значения активного сопротивления и емкости на выводах 1, 2 и 3, что подсчитывается по формуле, вытекающей из документации к этой микросхеме.
 Акустическая левитация — схема принципиальная
Акустическая левитация — схема принципиальная
Сигнал усиливается в два этапа с помощью транзисторных усилителей. Напряжение повышенное на трансформаторе подпитывается с блока питания ATX. Его ферритовое ядро позволяет передать сигнала нужной частоты. Монтаж элементов выполнен на небольшой макетной плате.

Самая сложная часть акустического левитатора — пьезокерамический преобразователь (другое название ультразвуковой, пьезоэлектрический).

Резонансная частота его составляет около 40 кГц, максимальная мощность 60 Вт. При его работе с номинальной частотой звуковая волна имеет длину около 8,2 мм. Такие преобразователи применяются в ультразвуковых ваннах, в медицине или датчиках заднего хода в автомобилях (конечно более слабой мощности).

Еще одним элементом устройства является отражатель, то есть отражающая поверхность, которую вырезаем из пластика, установленного на резьбовых шпильках. Он позволит отразить волну на расстоянии, кратном половине ее длины.

Все находится на стабильной, двойной основе, вырезанной из ДСП.

Запуск и калибровка левитатора
Калибровка состоит из двух этапов:
1.Калибровка сенсора.
Для создания максимально возможного уровня сигнала. Сигнал генератора должен иметь частоту, равную или близкую к резонансной частоте преобразователя. Схема потребляет больше тока когда генерирует частоту, близкую к резонансной частоте преобразователя. С помощью потенциометра отрегулировать частоту генератора, а показания считываем амперметром. Ток будет около 1 А.
2.Калибровка отражателя.
Поверхность отражающая сигнал должна находиться на расстоянии, кратном половине длины волны, излучаемой преобразователем. С этой целью на матрице мы ставим объект и меняем положение рефлектора пока объект не начнет левитировать. Регулировка осуществляется с помощью гаек на резьбовых шпильках.
Источник
Аппарат ультразвуковой левитации под управлением Aрдуино



В-третьих, звук — это вибрация, которая распространяется через среду, например, газ, жидкость или твердый объект. Если ударить в колокольчик, он завибрирует в воздухе.
* В утверждении авторов есть спорные моменты, но это их личное мнение.
Акустический левитатор состоит из двух основных частей — преобразователя, который представляет собой вибрирующую поверхность, издающую звук, и отражателя. Часто преобразователь и отражатель имеют вогнутые поверхности, помогающие сфокусировать звук. Звуковая волна распространяется от преобразователя и отражается от отражателя. Свойства этой бегущей отражающей волны помогают ей «подвешивать» объекты в воздухе.
Когда звуковая волна отражается от поверхности, взаимодействие между ее сжатием и разрежением вызывает интерференцию. Сжатия, которые встречаются с другими сжатиями, усиливают друг друга, а сжатия, которые встречаются с разрежением, уравновешивают друг друга. Иногда отражение и интерференция могут образовывать стоячую волну. Кажется, что стоячие волны движутся вперед и назад или колеблются сегментами, а не перемещаются с места на место. Эта иллюзия неподвижности и дает название стоячим волнам.
Стоячие звуковые волны имеют определенные узлы или области минимального давления и пучности или области максимального давления. Узлы стоячей волны являются причиной акустической левитации.
Размещая отражатель на правильном расстоянии от преобразователя, акустический левитатор создает стоячую волну. Когда ориентация волны параллельна силе тяжести, части стоячей волны имеют постоянное давление вниз, а другие — постоянное давление вверх. Помещая между ними какой-то небольшой легкий предмет, мы и имеем эффект левитации.

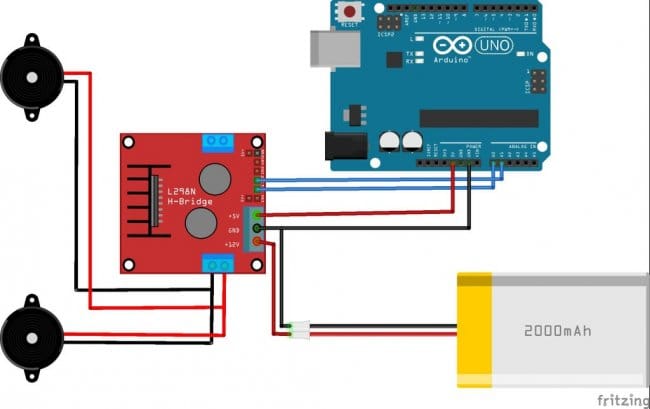
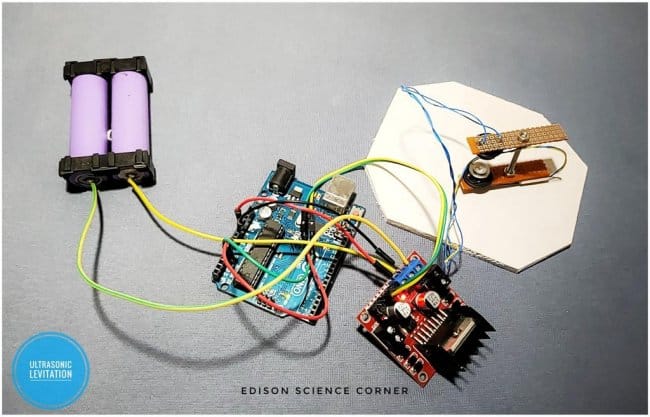
Шаг второй: схема
Принцип работы схемы очень прост. Основным компонентами этого проекта является Arduino, драйвер двигателя L298 и ультразвуковой преобразователь, собранный из модуля ультразвукового датчика HCSR04. Как правило, ультразвуковой датчик передает акустическую волну на частоте от 25 кГц до 50 кГц. Эти ультразвуковые волны создают стоячие волны с узлами и пучностями.
Рабочая частота данного ультразвукового преобразователя составляет 40 кГц.
Итак, цель использования Arduino состоит в том, чтобы генерировать высокочастотный колебательный сигнал 40 кГц для ультразвукового датчика или преобразователя, и этот импульс подается на вход IC L293D драйвера двигателя (от контактов Arduino A0 и A1 ) для управления ультразвуковым преобразователем. В результате ультразвуковой преобразователь производит акустические звуковые волны.
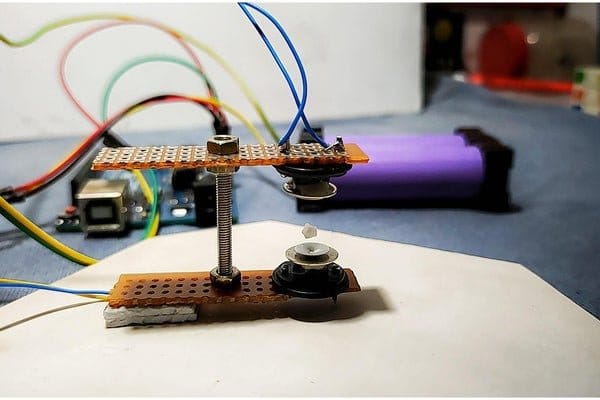
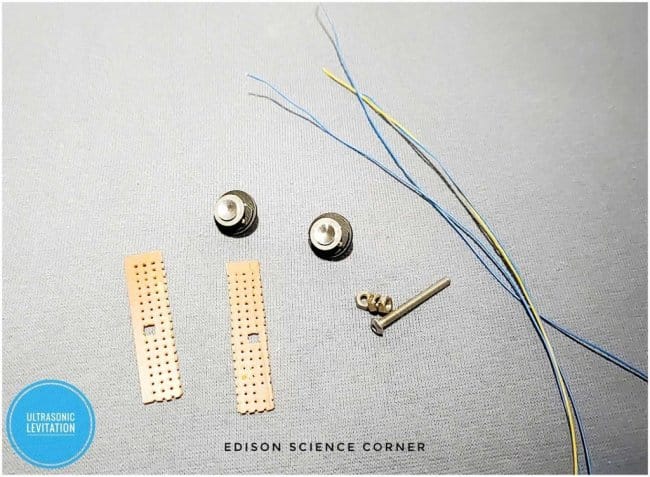
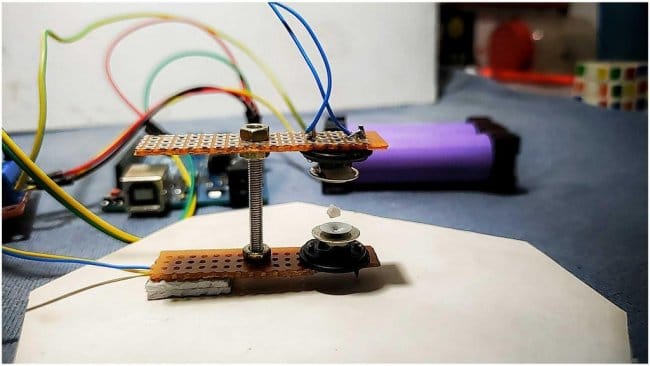
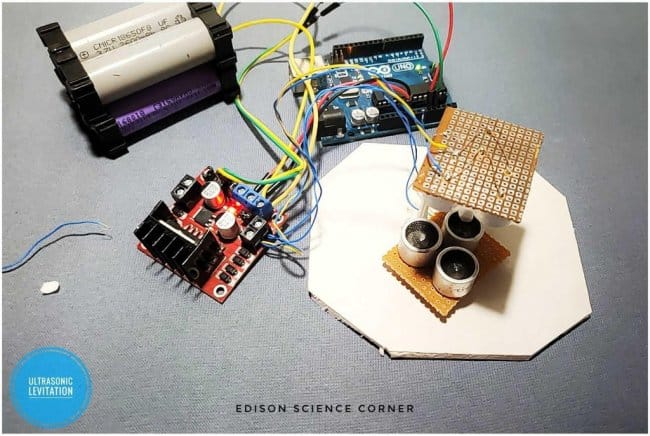
Шаг третий: изготовление преобразователя
Сначала нужно демонтировать ультразвуковые датчики. Затем нужно снять защитный колпачок и нарастить провода.
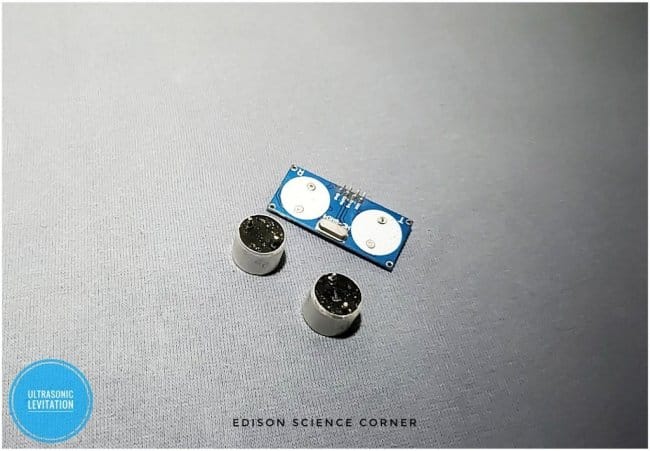
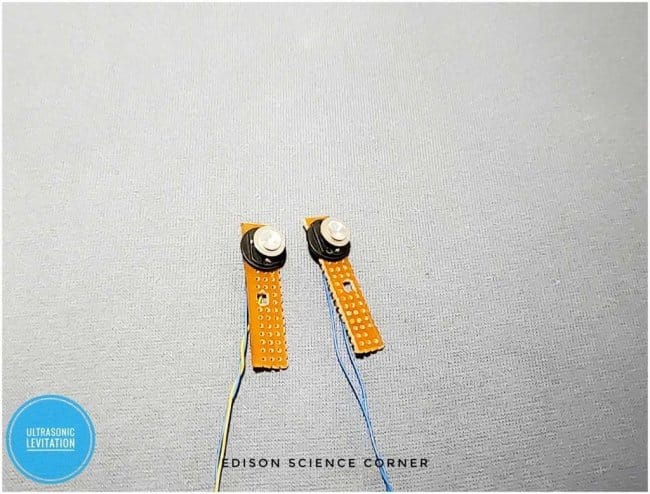
Дальше отрезаем две пластинки от платы. Сверлим отверстие под винт. Ультразвуковые датчики размещаем на концах плат.
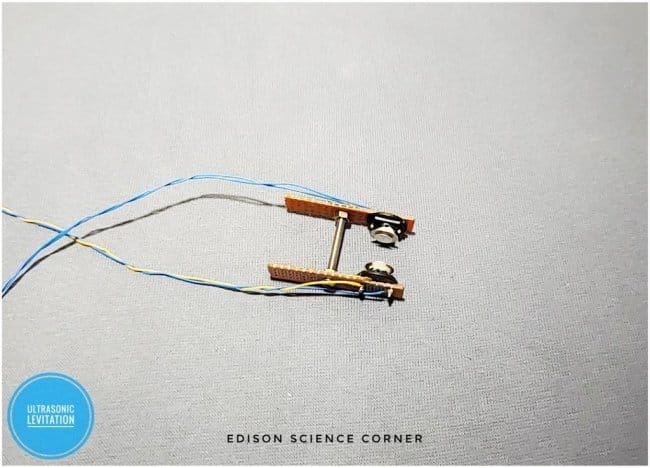
Положение ультразвуковых преобразователей очень важно. Они должны быть обращены друг к другу и они должны находиться на одной линии, чтобы ультразвуковые звуковые волны могли распространяться и пересекаться друг с другом в противоположных направлениях.

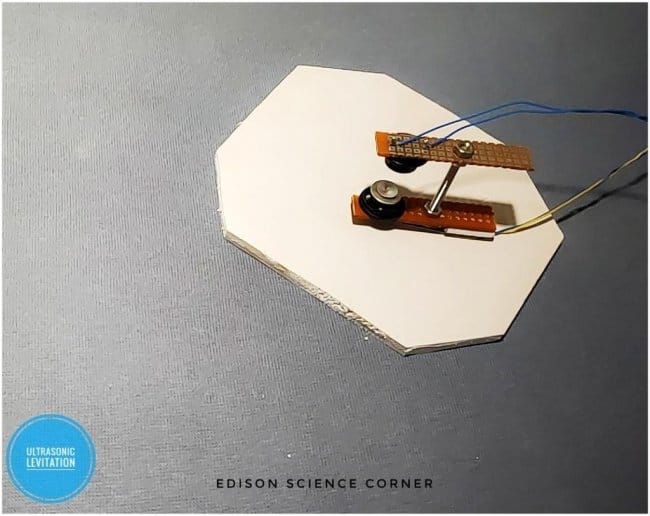
Шаг пятый: работа аппарата и улучшения
Размещение датчика очень важно, поэтому нужно постараться установить его в правильном положении.
Мощность устройства небольшая и «работать» оно будет только с небольшими легкими предметами, например, бумагой или пенопластом.
Для питания устройства нужен ток не менее 2 А.
Устройство рабочее, а вот попытка сделать более мощный аппарат, для более тяжелых предметов, не удалась.
Работу устройства, а также его сборку можно посмотреть на видео.
Источник
Акустическая левитация своими руками
Сегодня я расскажу и покажу, как в домашних условиях повторить эффект ультразвуковой левитации своими руками.
В предыдущих статьях раз, два. Я демонстрировал псевдо левитацию. В этот раз все по настоящему. Начну с теории.
Звуковые колебания
Чтобы понять всю суть эффекта левитации, нужно понять, что такое звуковая волна и стоячая волна.
По этому я начну с них. Акустическая волна распространяется во все стороны и состоит из двух полуволн, положительной и отрицательной. Положительная полуволна представляет из себя зону сжатия или повышенного давления, в дальнейшем я буду ее называть компрессионная, а отрицательная полуволна зону разряжения, назовем ее декомпрессионная.

На практике это выглядит так: Диффузор динамика при движении наружу создает компрессию, а при движении во внутрь декомпрессию. На изображении это наглядно показано.

Максимальная сила волны создается около диффузора динамической головки и в процессе отдаления от излучателя постепенно теряет свою мощность, чем дальше от динамика тем она слабее.
Стоячая волна — это волна, которая образуется при наложении двух встречных, совпадающими по фазам и с одинаковой частотой волн. Если обычная волна теряет свою мощность в процессе распространения в пространстве, то стоячие волны на не больших расстояниях образуют узлы с примерно равной мощностью. Достигается это за счет складывания разнонаправленных волн. Слабеющая волна усиливается за счет встречной волны. Чтобы понять как это происходит, посмотрите на изображение ниже. Серым цветом выделены узлы или в нашем случаи полки из стоячих волн. На этих полках(узлах) и удерживаются предметы.

Длина волны — это скорость звука разделенная на частоту колебаний. При температуре 20°C и влажности воздуха 50%, звук распространяется в такой среде со скоростью 340 м/с. Резонансная частота колебаний нашего пьезоизлучателя примерно 40 000 Гц. В итоге получаем длину волны 340000 мм / 40000 Гц = 8,5 мм. Длина стоячей волны будет такой же 8,5 мм.
Излучатели можно располагать на разном расстоянии друг от друга, но оно всегда должно быть кратным длине волны. Чем меньше расстояние между излучателями, тем мощнее узлы стоячей волны. Чем больше пространства между акустическими трансмиттерами, тем больше узлов между ними, но слабеет мощность узлов и наоборот. Так же нужно понимать, что для удержания большого количества предметов в узлах волн и на большем отдалении между ультразвуковыми излучателями, потребуются более мощные пьезо головки. Например от автомобильных парковочных радаров, или от бытовых увлажнителей. В этой статье я рассматриваю самый доступный и бюджетный ультразвуковой излучатель. Который можно выпаять из дальномера HC-SR04.
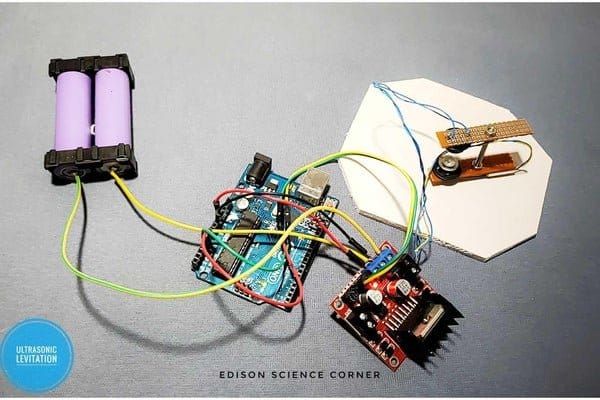
Схема подключения — я использовал Ардуино нано и драйвер моторов MX1508, можно было бы обойтись генератором NE555, а в качестве усилителя для излучателей использовать микросхему MAX232 которая установлена на дальномере HC-SR04, но я для себя избрал более простой путь, который сэкономил мне время. Так как на сборку акустического левитрона у меня ушло не более 5 минут. Соединения я произвел набором проводов dupont.

Описание скетча Ардуино
Код ничего особенного из себя не представляет. Все сводится к настройке таймера и дерганий ногами порта D Arduino. Для этого переводим Timer1 в режим сброса при совпадении(CTC) и теперь при совпадении значений регистра счета TCNT1 с заданным числом в регистре сравнения OCR1A, будет срабатывать прерывание, в обработчике которого выполняется инверсия всего порта D. После чего счетный регистр обнулитcя и после выхода из обработчика процесс счета запустится по новой.
Нужное нам значение регистра OCR1A рассчитывается следующим образом: так как делитель в регистре TCCR1B выключен, то мы берем частоту тактового генератора 16 000 000 Гц и делим на требуемую нам частоту срабатывания прерывания 80 000 Гц, в результате получаем число 200, это и будет наше значение для регистра OCR1A.
Почему 80 кГц, а не 40 кГц, спросите Вы? Потому, что период в обработчике формируется за два срабатывания прерывания. При первом срабатывании на выходах формируется D3=0 и D4=1, а при втором D3=1 и D4=0.
Источник